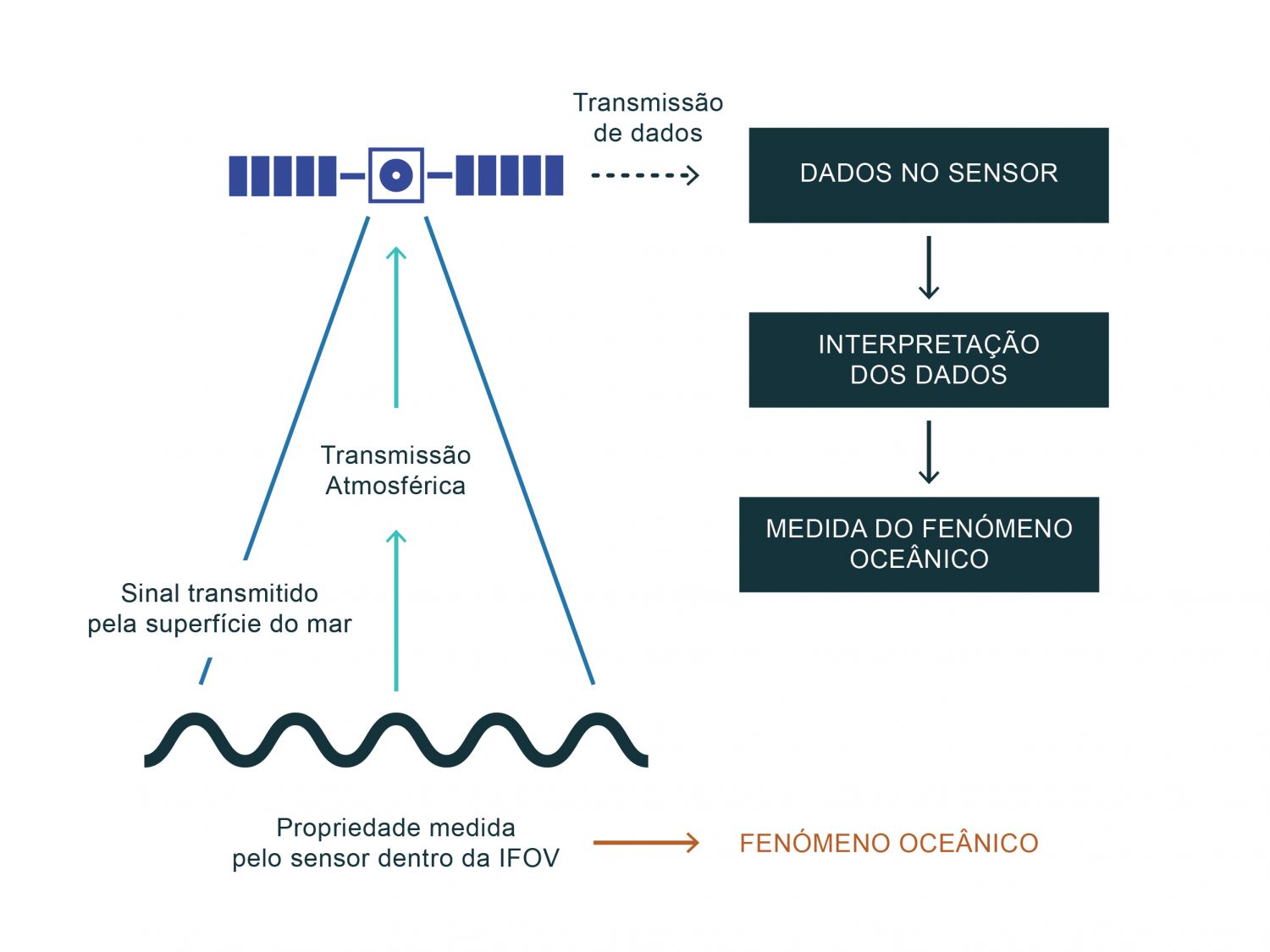
Esquema do fluxo de informação na deteção remota sobre os oceanos. As caixas à direita indicam o que é necessário conhecer para compreender os processos que controlam o fluxo de informação (adaptado de Robinson, 2004). A informação obtida pelos sensores remotos é feita a partir da análise da radiação eletromagnética recebida após interação com o objeto em estudo, neste caso, pelos oceanos. Como os satélites estão a altitudes de centenas ou mesmo milhares de quilómetros acima da superfície do mar, a radiação eletromagnética tem de percorrer um longo caminho, desde que é refletida ou retrodifundida pelo oceano até ser recebida pelo sensor. Assim, é necessário saber se a radiação que chega ao sensor tem origem na coluna de água ou na atmosfera, e ter ainda em conta que ao atravessar a atmosfera, a radiação pode ser absorvida ou difundida para longe do sensor. Estima-se que apenas cerca de 10% a 20% de toda a radiação que chega ao sensor contém informação sobre a superfície do mar. O sensor observa a superfície do mar através de um sistema de lentes e espelhos ou, no caso de sensores de microondas, através de uma antena cujo cone de receção de radiação é um cone em 3D. Em cada instante, a informação recebida no sensor provém do chamado campo de visão instantânea ou Instantaneous Field of View (IFOV). A área do IFOV é definida pela geometria do sensor e pela zona do espectro em que atua. Após a receção dos dados nos sensores, estes são enviados para estações de dados na Terra, onde é feito o processamento com o objetivo de recuperar os dados relativos à superfície do oceano. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
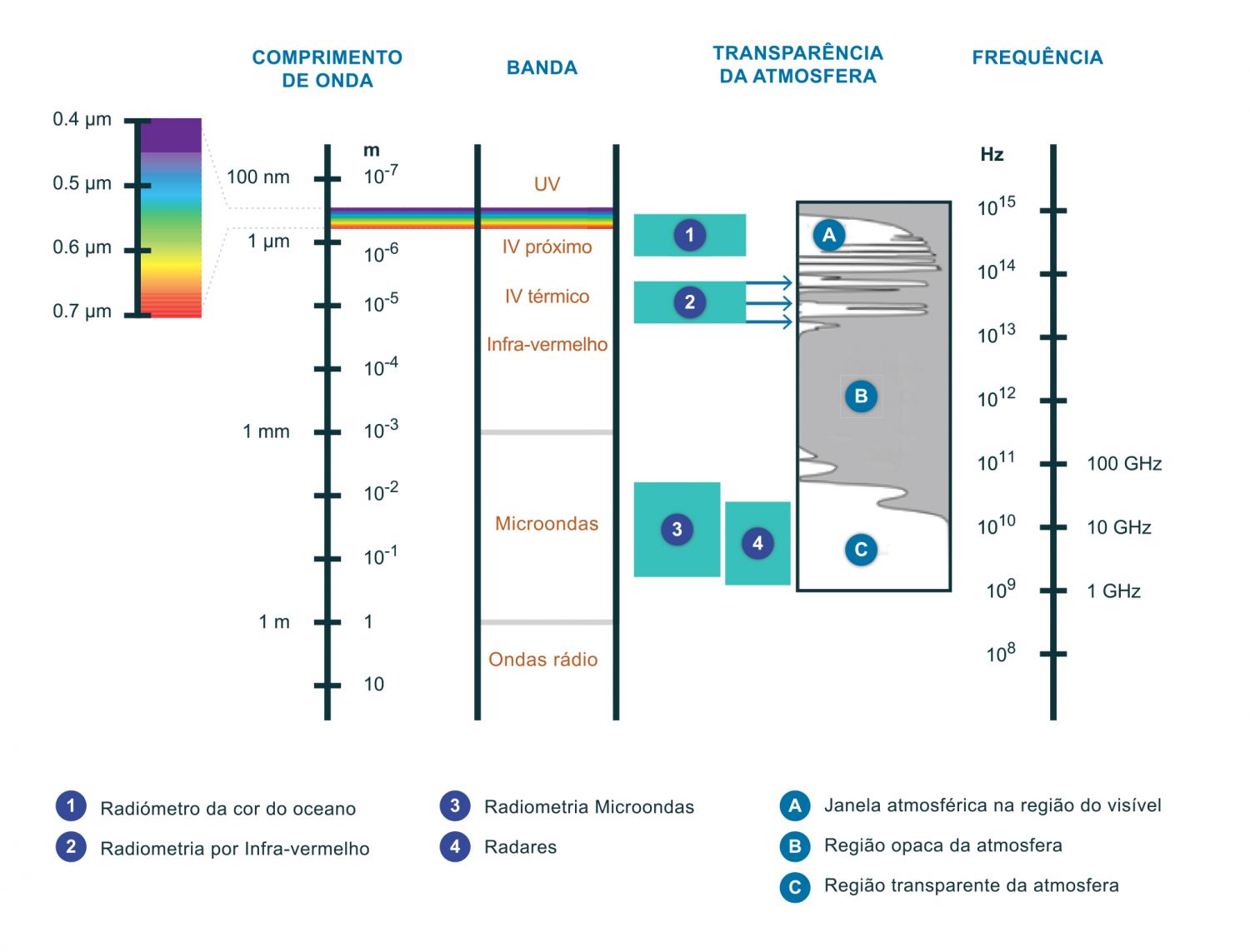
O espectro eletromagnético e as janelas atmosféricas utilizadas pelos vários tipos de sensores na deteção remota do oceano (adaptado de Robinson, 2010). A figura representa a porção do espectro que é utilizada para a deteção remota sobre os oceanos. Os comprimentos de onda utilizados vão desde os mais baixos, os ultravioletas com cerca de 100 nm (1 nm = 1x10-9 m), até aos mais elevados, que chegam a 1 m na zona do espectro pertencente às microondas. A radiação visível, percetível pelo olho humano, tem comprimentos de onda que variam entre 390 nm, que correspondem à cor violeta, e 700 nm, que o nosso olho “vê” como a cor vermelha. É nesta parte visível do espectro que os sensores da cor do oceano operam. A figura ilustra também a transmissibilidade da atmosfera para as várias zonas do espectro, isto é, a percentagem de radiação que é capaz de atravessar a atmosfera em cada região do espectro. A escolha de uma zona do espectro para a deteção remota é determinada pela capacidade da radiação eletromagnética ser transmitida através da atmosfera. As zonas do espectro em que a radiação eletromagnética consegue ser transmitida são designadas de janelas atmosféricas, e para cada janela foi desenvolvido um tipo de sensor capaz de operar nessa zona do espectro e recolher informação da superfiície do mar. Por exemplo, na zona do visível até cerca de 70% da radiação consegue passar através da atmosfera e, como referido anteriormente, é aqui que operam os sensores da cor do oceano que recebem radiação (sensores passivos) vinda não só da superfície do mar como da atmosfera. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
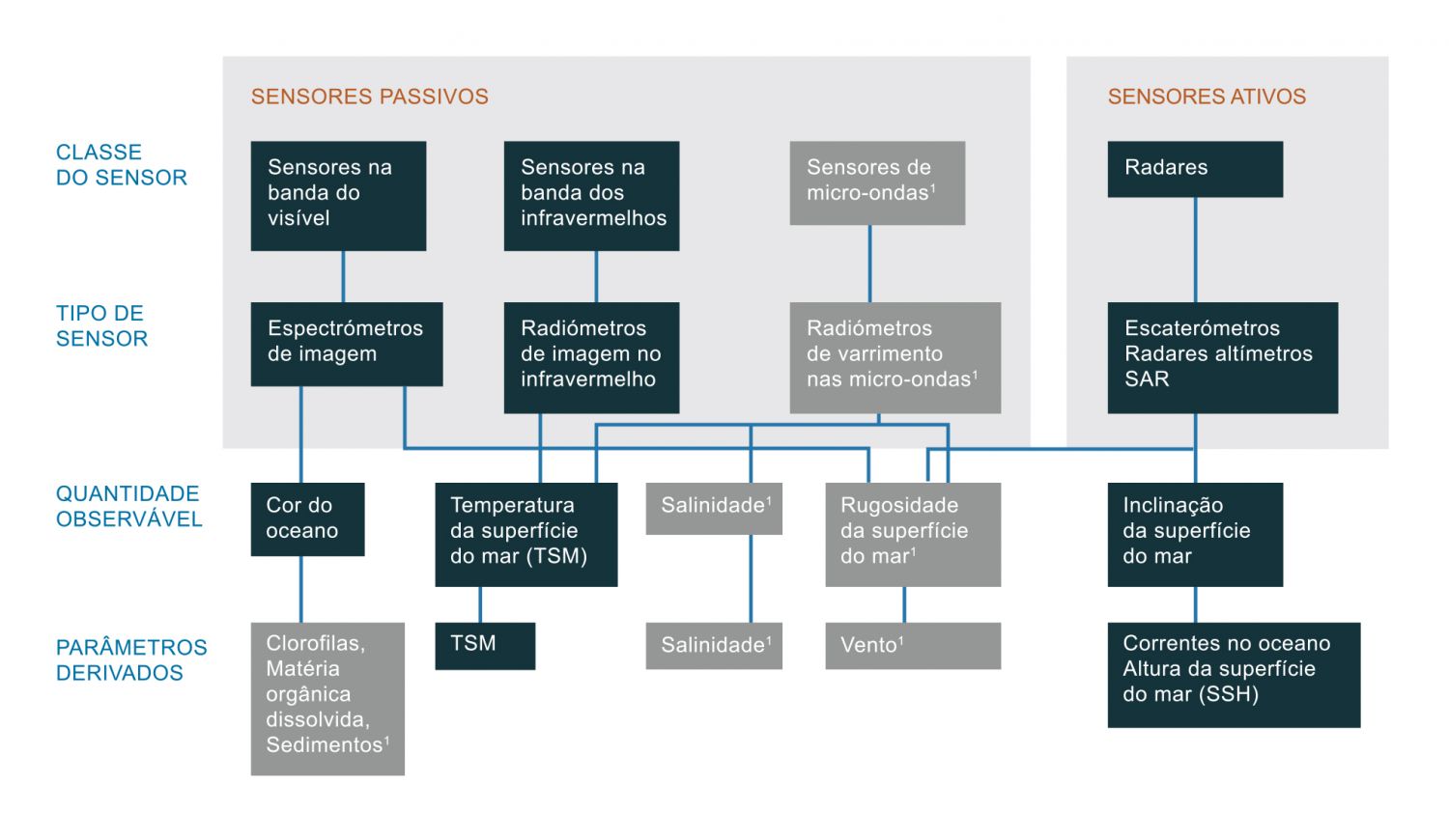
As diferentes classes de sensores a bordo de satélites e os parâmetros primários e derivados que são medidos por cada sensor (adaptado de Robinson, 2004). Existem duas classes de sensores utilizados para a deteção remota. Os sensores passivos são os mais simples pois limitam-se a receber radiação eletromagnética proveniente de um pequeno cone de direções. Esta classe de sensores opera em três principais janelas atmosféricas: no visível, no infravermelho térmico e nas microondas. Os sensores ativos ou radares emitem um pulso eletromagnético na direção da superfície do mar onde é refletida/difundida de volta ao sensor (o eco). Os radares medem o tempo que decorre entre a emissão do pulso e a receção do seu eco. Este tipo de sensores só opera na região das microondas. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
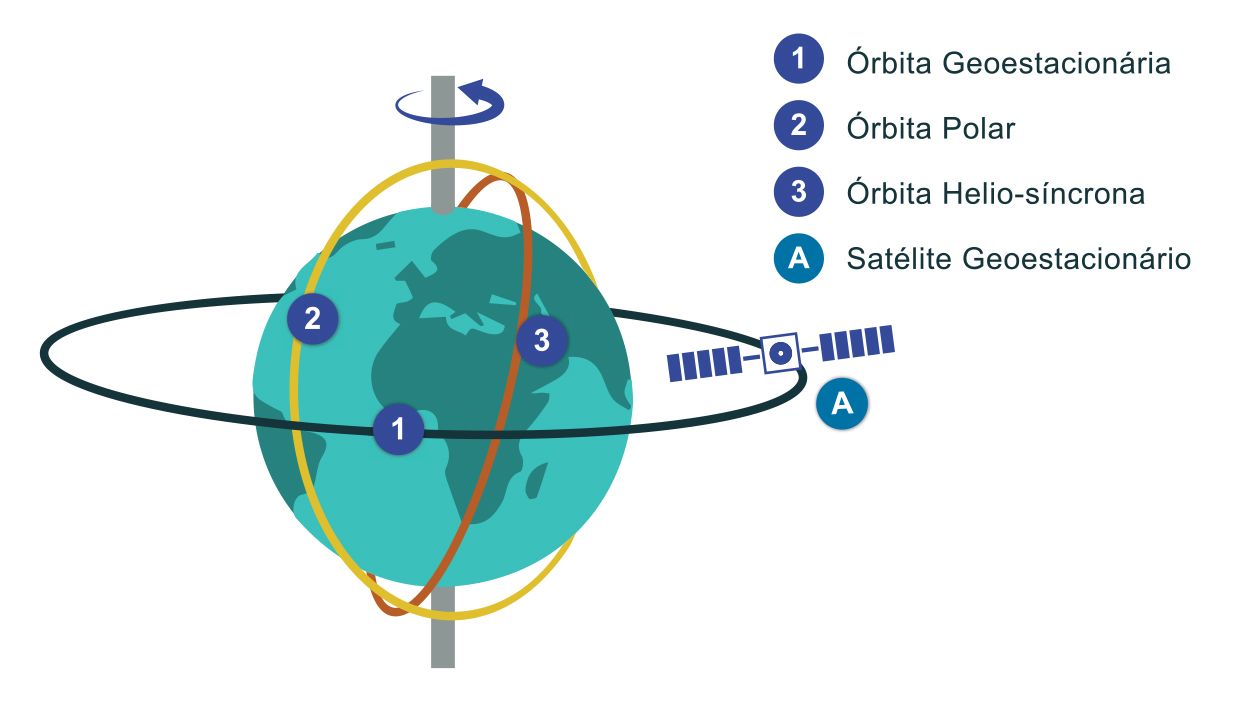
Altitudes dos satélites e tipos de órbitas para a observação da Terra. Existem três tipos de órbitas possíveis a qualquer satélite em órbita à Terra: elíptica, parabólica ou hiperbólica. Para fins de observação da Terra, o satélite terá de descrever uma órbita elíptica, ou um caso especial desta, a órbita circular. Dentro destas órbitas, só duas são usadas para observação da Terra: a órbita geoestacionária e a órbita quase-polar. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
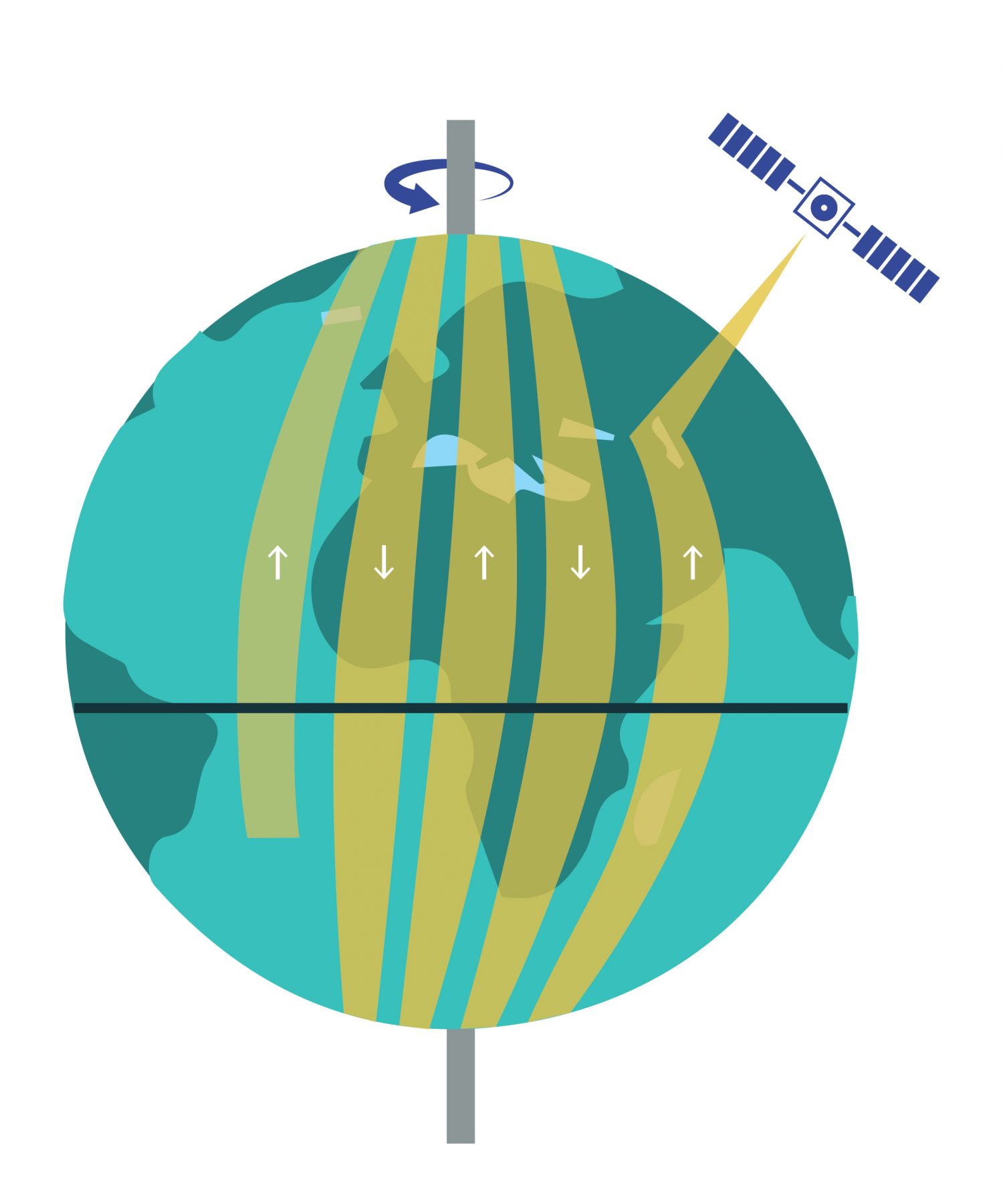
Área da superfície terrestre medida por um satélite em órbita quase-polar. Cada faixa iluminada corresponde à pegada do satélite numa passagem ascendente (com a correspondente passagem descendente pelo outro lado da Terra).No caso dos satélites em órbitas quase-polares a área da superfície da Terra que é medida pelos sensores é determinada pelo facto de a Terra estar a girar sob a órbita (ascendente ou descendente) do satélite. A área terrestre que o sensor cobre em cada passagem é a sua chamada “pegada”. Visto que a Terra vai rodando por debaixo do satélite, a área terrestre que o satélite cobre por dia depende da quantidade de vezes que consegue descrever órbitas completas à Terra, ou seja, depende do período orbital do satélite. Satélites que descrevam várias voltas à Terra no período de um dia sideral, vão ser capazes de cobrir uma maior área da Terra, e as pegadas ficam mais próximas umas das outras. No entanto, até voltarem a fazer medições sobre um mesmo local, i.e., até revisitarem o local, irão demorar mais tempo. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
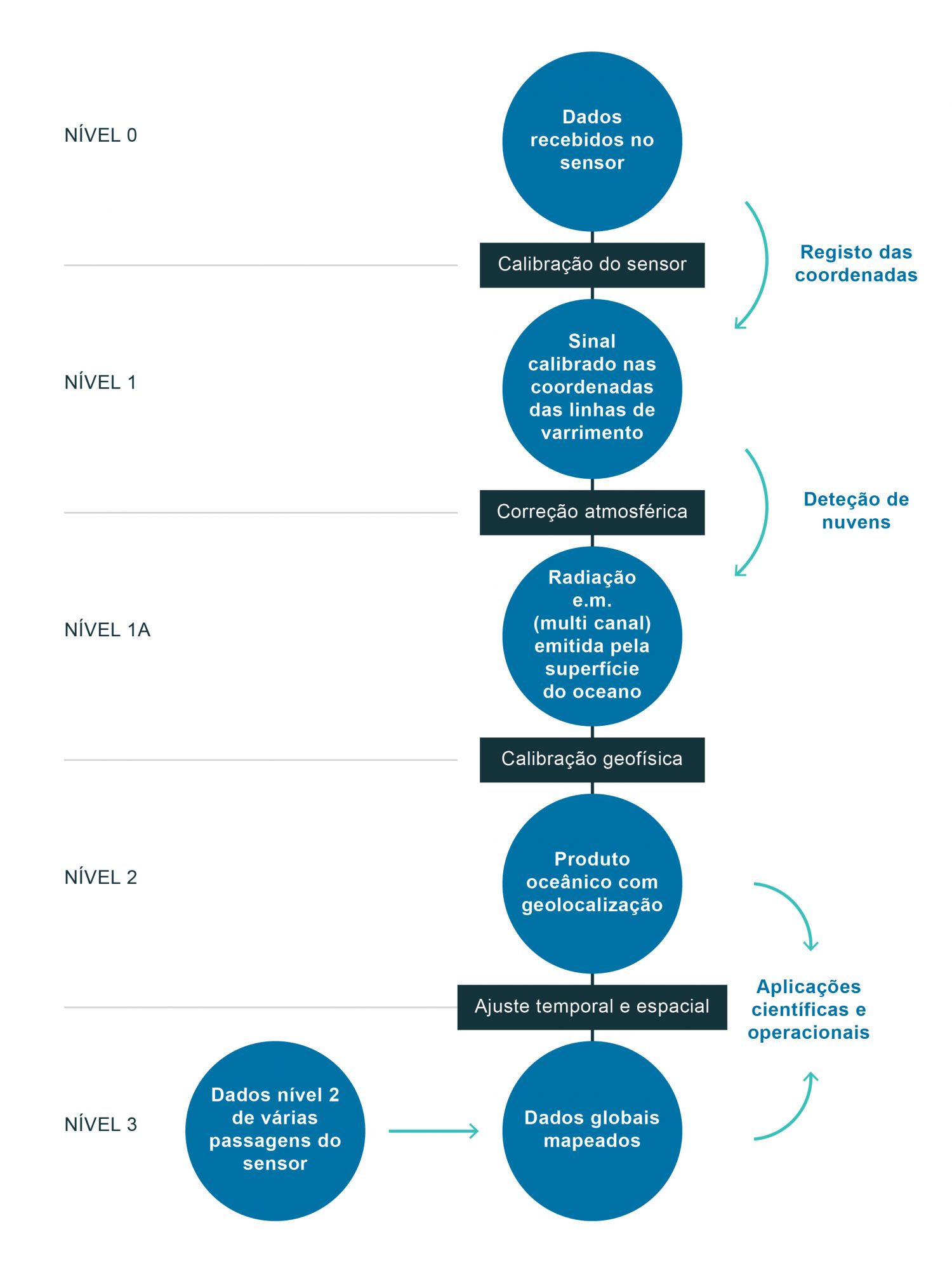
Níveis de processamento das imagens de satélite que mostram o tratamento necessário para passar de dados em bruto a dados que possam ser usados para aplicações oceanográficas (adaptado de Robinson, 2010). Os dados transmitidos pelos sensores não podem ser utilizados imediatamente já que estão em formato binário. Assim, existem vários passos no processamento dos dados, geralmente levados a cabo pelas agências espaciais responsáveis pelo sensor. A figura esquematiza os vários passos e o processamento necessário para se chegar a uma imagem que seja própria para fins científicos com aplicações variadas. Como se pode ver, há um vasto número de processos, calibrações e validações que são necessárias para se conseguir produzir uma “imagem” inteligível. Uma imagem nível 3, por exemplo, resulta de uma média de várias passagens do sensor que necessariamente aumenta o período entre imagens sucessivas e diminui a resolução espacial. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
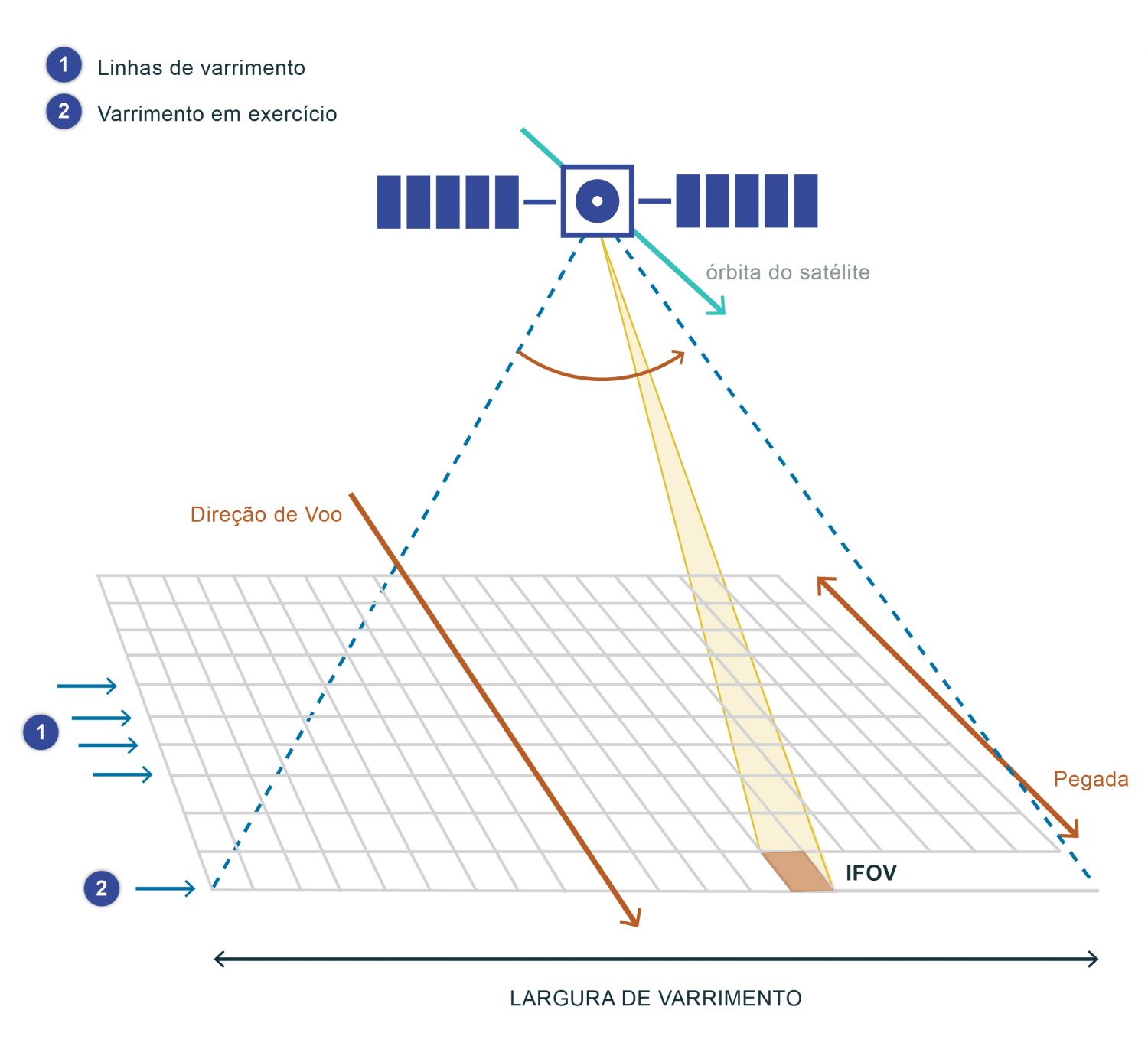
Esquema da geometria de um sensor de varrimento na direção perpendicular à do voo (adaptado de Robinson, 2004). Na figura está esquematizado um exemplo de um sensor de varrimento que tem um sistema de espelhos rotativos que “varrem” a superfície da Terra, recolhendo informação na área abrangida pelo varrimento. No caso da figura, o varrimento é feito na direção perpendicular à de voo. Os sensores de varrimento permitem a recolha de informação numa área maior do que um sensor que observasse só um ângulo. Geralmente, o sensor é construído de modo a que no tempo que leva a completar cada linha de varrimento o sensor avança uma distância igual à pegada medida na direção de voo. Isto permite obter as linhas de varrimento contíguas. O varrimento pode fazer-se numa só direção ou em ambas, e a geometria do varrimento pode ser retangular ou cónica, dependendo do desenho do sensor. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
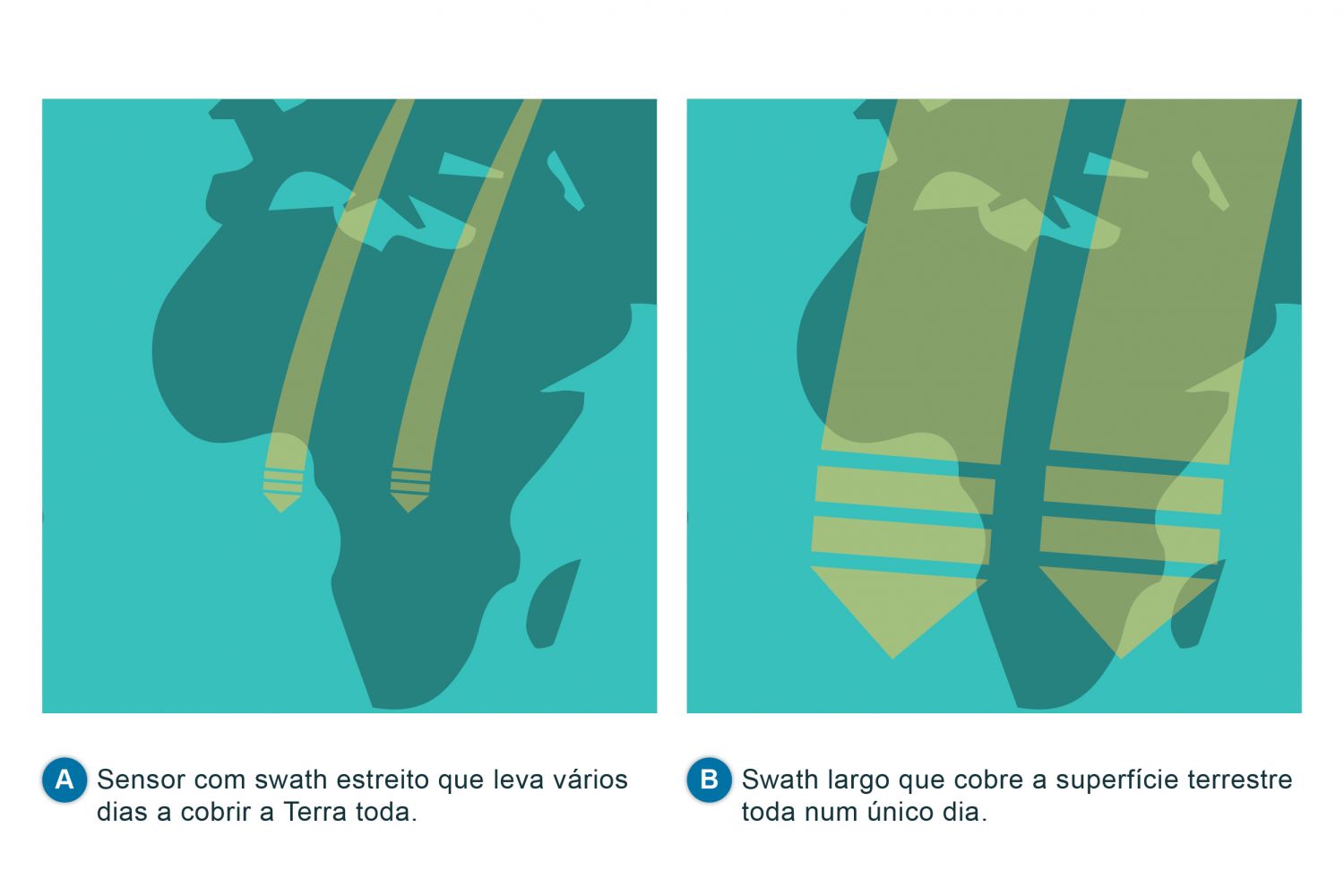
Exemplo de área coberta de sensores com swath diferentes (adaptado de Robinson, 2004). A frequência com que se consegue obter uma imagem sobre o mesmo local depende do período das órbitas. Um menor intervalo de tempo entre passagens sucessivas leva a uma menor cobertura espacial e maior espaçamento entre pegadas das órbitas, enquanto um maior intervalo entre passagens sobre o mesmo local vai permitir que o satélite cubra uma maior área da superfície. Existe portanto uma relação custo-benefício ou um trade-off entre a resolução espacial e a resolução temporal, já que uma é conseguida à custa da outra. Para sensores em órbitas quase-polares este trade-off pode ser parcialmente compensado para sensores cuja largura de varrimento ou swath é grande, i.e., ~1000-2000 km em vez de ~100-200 km. Como se pode ver na figura, se houver sobreposição entre sucessivos varrimentos, esse sensor irá conseguir ter uma maior cobertura da Terra. Por exemplo, um sensor com swath de 1500 km conseguirá uma cobertura total bi-diária. No entanto, como se referiu na secção anterior, uma maior largura de varrimento implica uma perda de resolução espacial e de novo será necessário fazer-se uma avaliação da relação custo-benefício entre a resolução espacial e a temporal. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
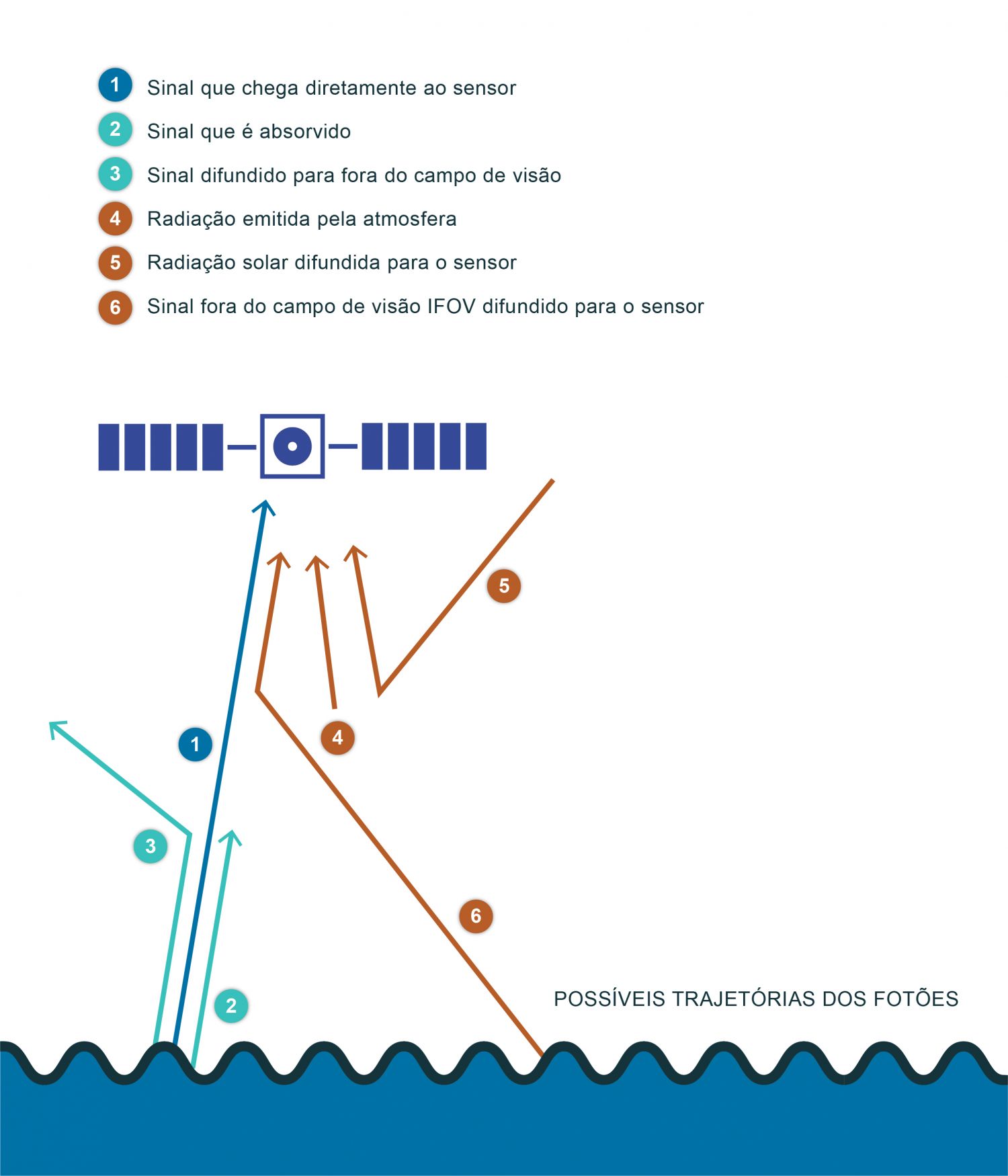
Possíveis trajetórias da radiação eletromagnética (adaptado de Robinson, 2004). Na figura estão representadas as trajetórias possíveis da radiação eletromagnética recebida no sensor (Robinson, 2004). Se não existisse atmosfera a absorver e a difundir a radiação emitida, a radiação recebida no sensor seria o resultado da soma dos raios 1, 2 e 3. No entanto, a radiação recebida no sensor é a soma dos raios 1, 4, 5 e 6. Para o espectro no visível e infravermelho é muito importante contabilizar-se a absorção na atmosfera do sinal proveniente da superfície do mar, o raio 2. Esta é maioritariamente resultado da presença de nuvens. O método mais simples de determinação da presença de nuvens é estabelecer um valor a partir ou abaixo do qual se determina que há contaminação devido à presença de nuvens. No caso dos sensores de cor será um nível de refletância muito alto (já que o topo das nuvens reflete a luz visível) e no caso do infravermelho térmico, será um valor de irradiância mais baixo.Uma boa correção atmosférica permite estimar a radiação resultante dos raios 2 e 3 e para tal necessita de meios para calcular também a parte da radiação recebida pelo sensor que é resultado das contribuições feitas pelos raios 4, 5 e 6. Este esquema cobre os efeitos atmosféricos para qualquer tipo de sensor, no entanto nem todos os efeitos afetam os diferentes sensores. Por exemplo, o raio 4 só afeta medições feitas no infravermelho térmico, já que a atmosfera absorve radiação 2 e emite radiação a uma temperatura inferior. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
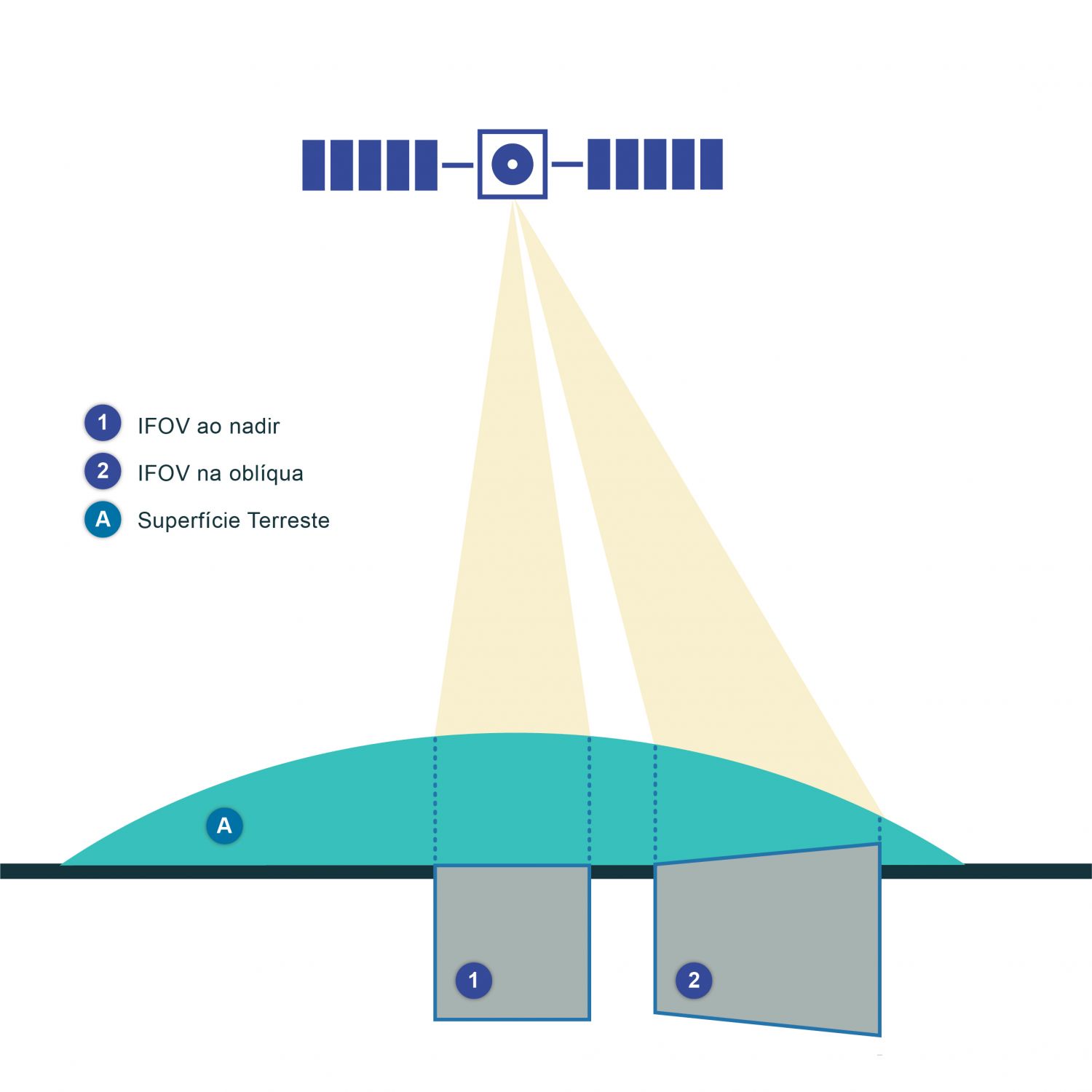
Distorção do campo de visão instantâneo (IFOV) causado por ângulos de visão oblíquos. Uma vez que a localização geográfica e a variável geofísica de cada píxel são conhecidas, a informação pode ser usada para o mapeamento em projeções que sejam mais inteligíveis para o utilizador. De um modo simples, neste passo dá-se a passagem das coordenadas do satélite em cada píxel para as coordenadas geográficas através de uma reamostragem dos dados. Este é o processo final na produção de imagens de satélite e talvez o que menos afeta a exatidão dos dados. A orientação da imagem definida pela geometria do sensor pode não ser de fácil interpretação já que pode haver distorção dos pixéis provocada pelo ângulo de visão do sensor. Esta distorção geralmente afeta mais os sensores com swath grande em que os ângulos de visão são maiores e as linhas de varrimento mais compridas e logo a distorção dos pixéis também aumenta. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
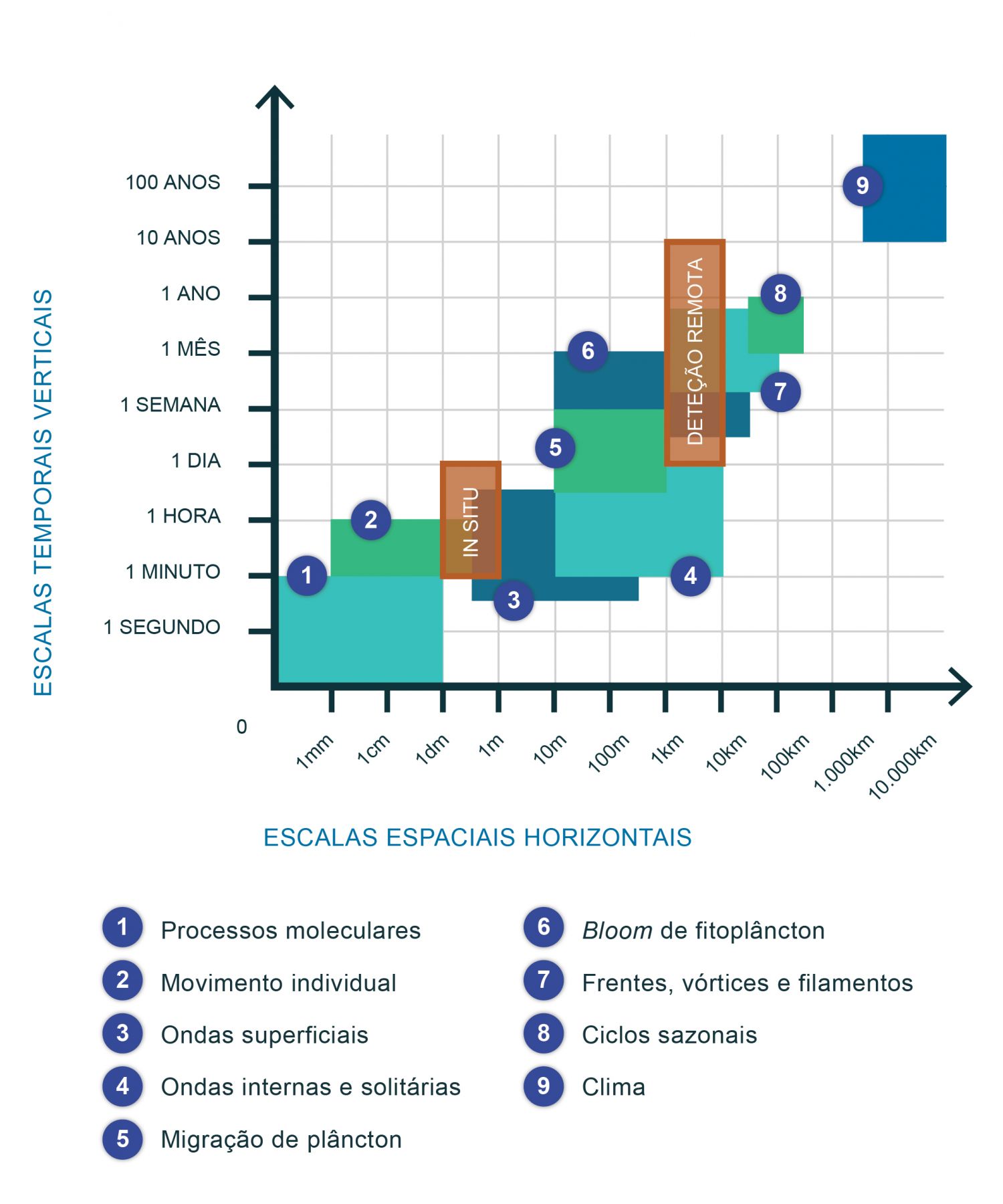
Escalas espácio-temporais de diferentes processos biogeoquímicos e das metodologias in situ e satélite. As medições feitas in situ, a bordo de navios ou por sondas submersas, são medições pontuais que cobrem uma área pouco extensa, assim como apenas fornecem dados durante um tempo limitado. As imagens obtidas por deteção remota, além de permitirem um estudo em grandes áreas, também permitem um estudo da evolução das condições ao longo do tempo, já que um satélite é desenhado para durar alguns anos. Isto permite aplicações sazonais, anuais e até à escala de poucas décadas. A figura ilustra as escalas temporal e espacial associadas a diferentes processos, comparando a aplicabilidade do método in situ e da deteção remota. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
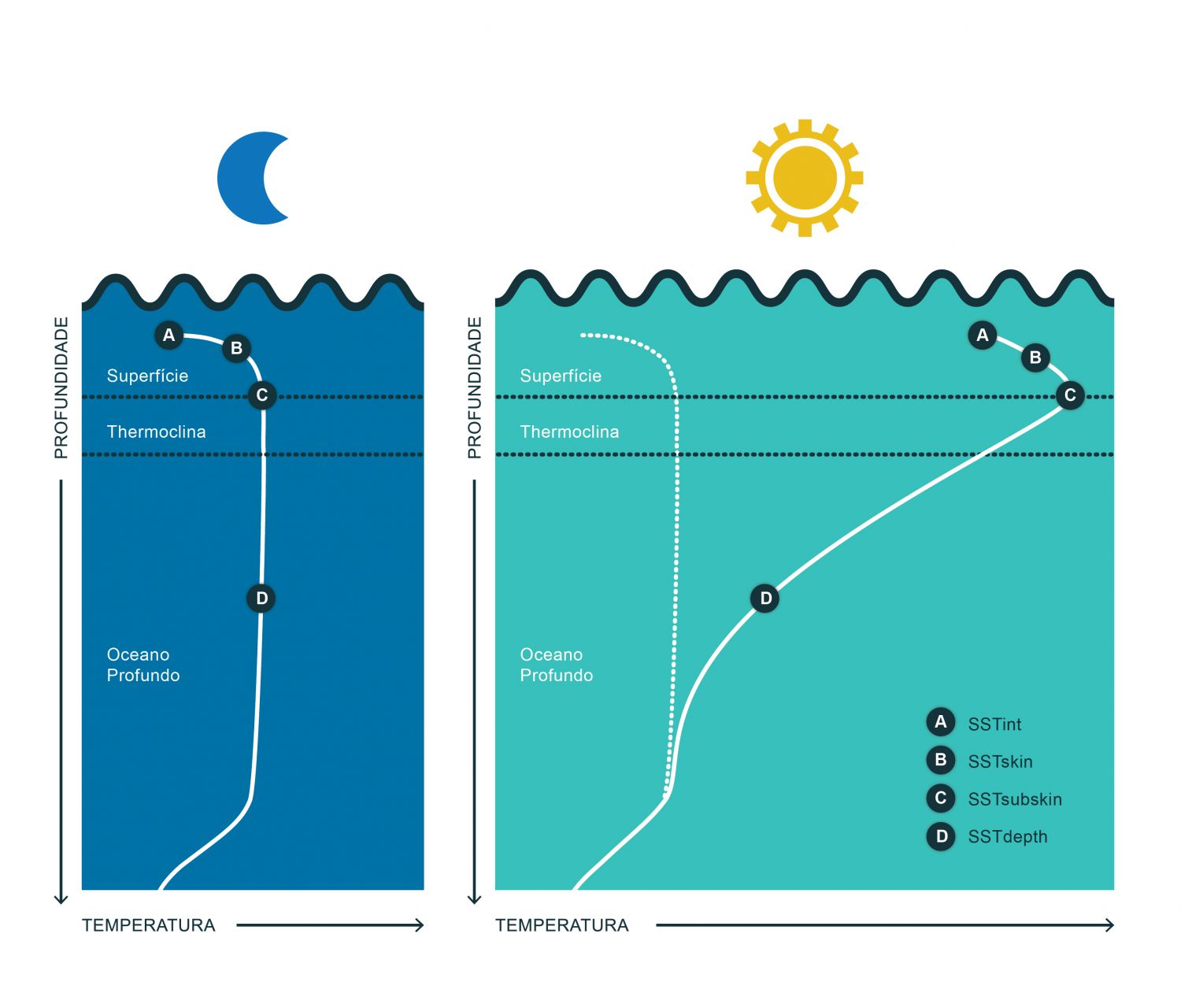
Esquema de um perfil de temperatura obtido durante a noite e durante o dia. SSTint é a Temperatura da Superfície do Mar - TSM na interface oceano-atmosfera, SSTskin é a temperatura da pele, SSTsubskin é a temperatura a cerca de 1 mm e SSTdepth é a temperatura bulk. No domínio do infravermelho, a absorção e a emissividade da água do mar têm um valor próximo de 100%. Isto implica que a maior parte da radiação emitida abaixo de 30 micrómetros seja reabsorvida antes de deixar a superfície do mar. Consequentemente, é a temperatura desta camada “pele” que caracteriza a emissão da radiação e controla a temperatura de radiação observada do espaço. As boias e outros métodos convencionais de medição da temperatura do mar medem a temperatura a alguns centímetros ou metros de profundidade, a chamada temperatura bulk, i.e., a temperatura medida entre cerca de 10 cm e 7 m de profundidade. A estrutura térmica dos primeiros metros do oceano irá ditar a diferença entre as duas temperaturas medidas. No caso de uma distribuição uniforme da temperatura, as medições deverão ser aproximadamente iguais, no entanto existem vários processos que provocam uma variação significativa da temperatura com a profundidade, aumentando a diferença entre os dois valores. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
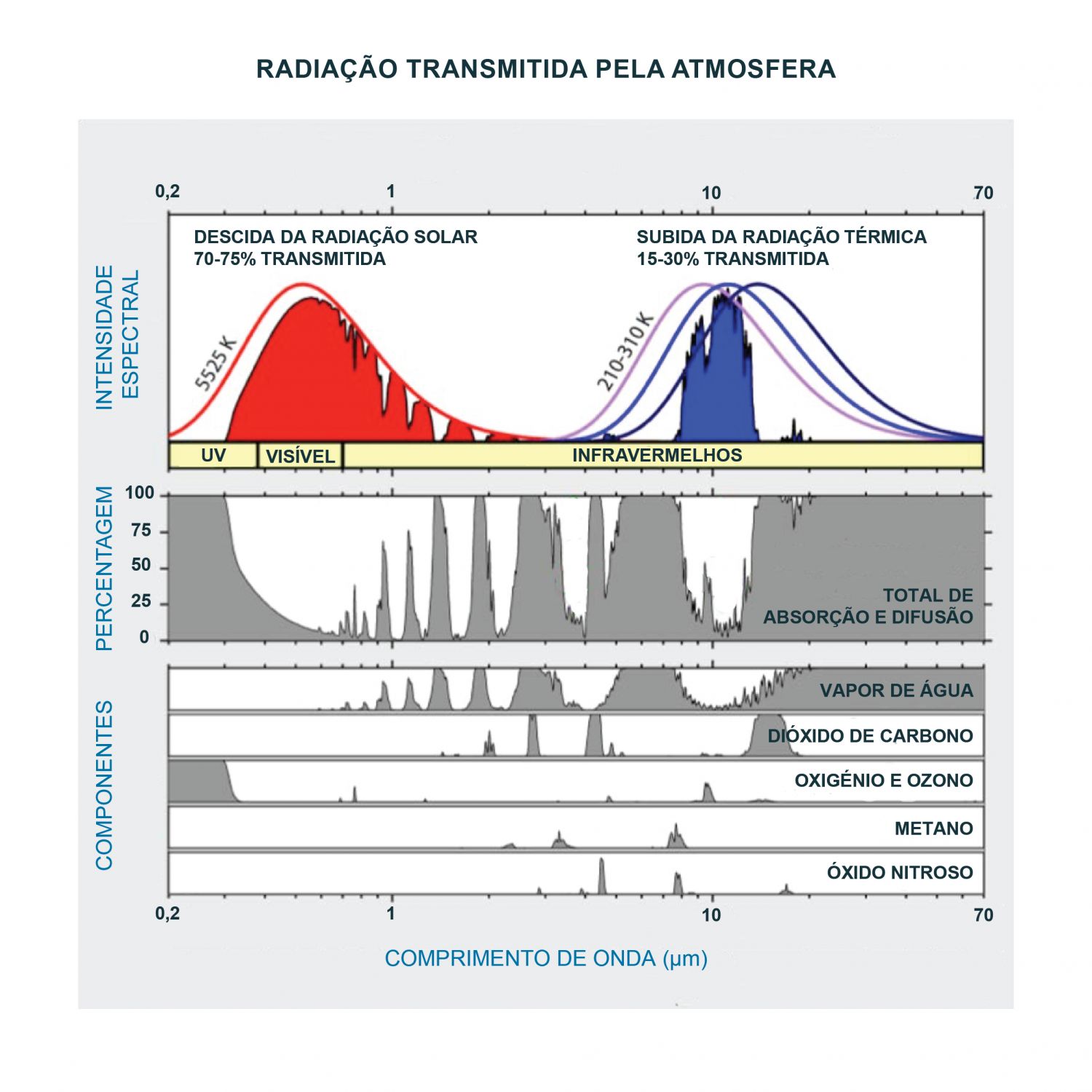
Radiação transmitida pela atmosfera e percentagem de radiação absorvida pelos constituintes principais da atmosfera. As setas verdes mostram as janelas atmosféricas usadas para a deteção remota no infravermelho. Os comprimentos de onda da radiação no infravermelho térmico situam-se entre 3 e 14 micrómetros. Como se pode ver na figura, nesta zona do espectro há constituintes atmosféricos que absorvem parte da radiação emitida pela superfície do mar e ao mesmo tempo emitem radiação. No entanto, a radiação emitida por aqueles constituintes corresponde a uma temperatura mais baixa pois a atmosfera está a temperaturas mais baixas que a superfície do mar e portanto a radiação que emitem terá um máximo desviado para maiores comprimentos de onda. Ao passar através da atmosfera o sinal emitido pelo oceano é atenuado. Os diferentes constituintes atmosféricos absorvem diferentes percentagens da radiação infravermelha emitida pela superfície do mar, sendo os principais absorventes o vapor de água, o ozono e o dióxido de carbono. Assim, na região do infravermelho térmico existem duas janelas usadas para a deteção remota, a primeira localizada entre 3,5 e 4,1 e a segunda entre 10,0 e 12,5 micrómetros. Nenhuma é completamente transparente já que os constituintes atmosféricos, o vapor de água em particular, irão absorver parcialmente o sinal emitido pela superfície do mar, aumentando a diferença entre a Temperatura de Brilho - TB medida no sensor e a verdadeira Temperatura da Superfície do Mar - TSM. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
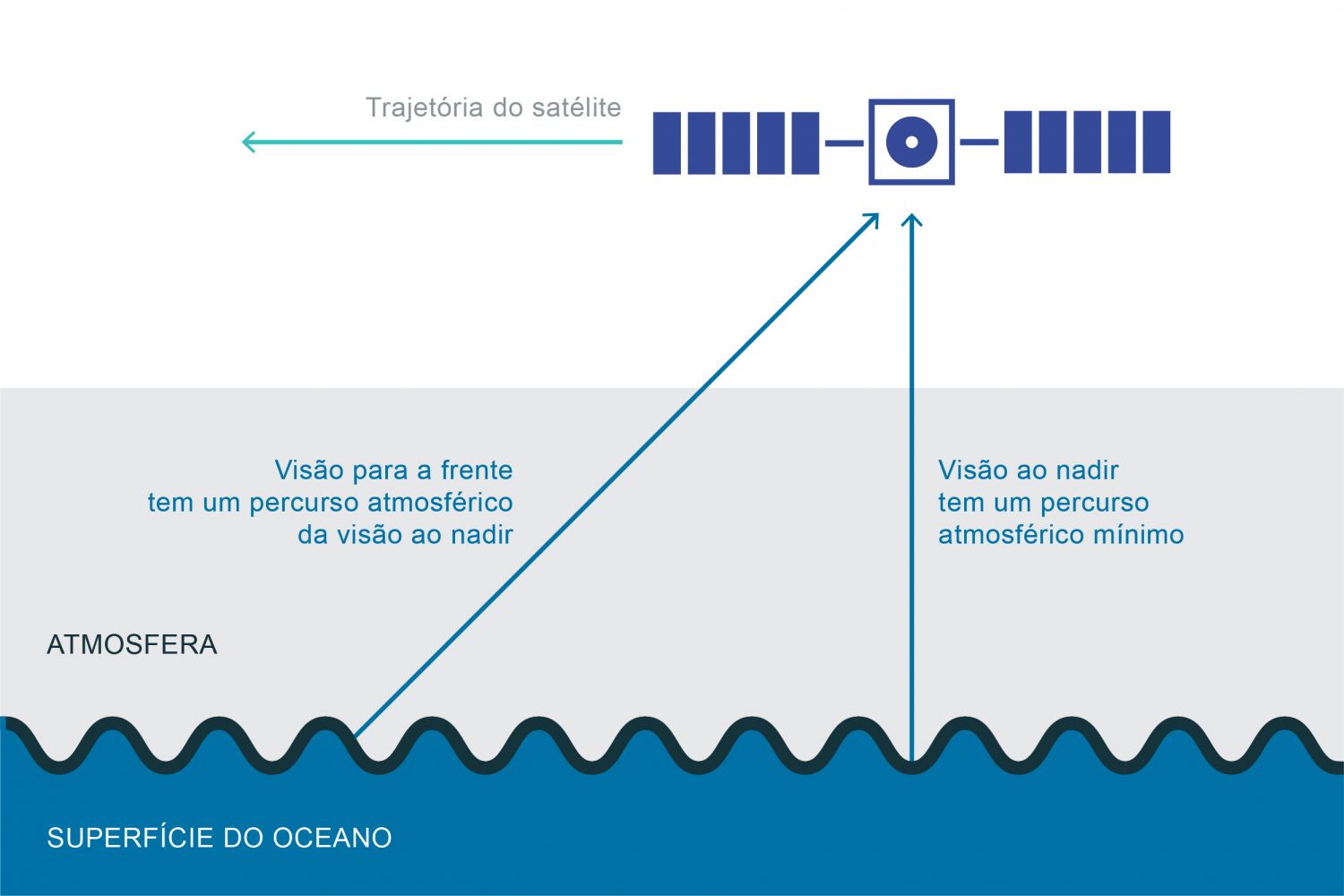
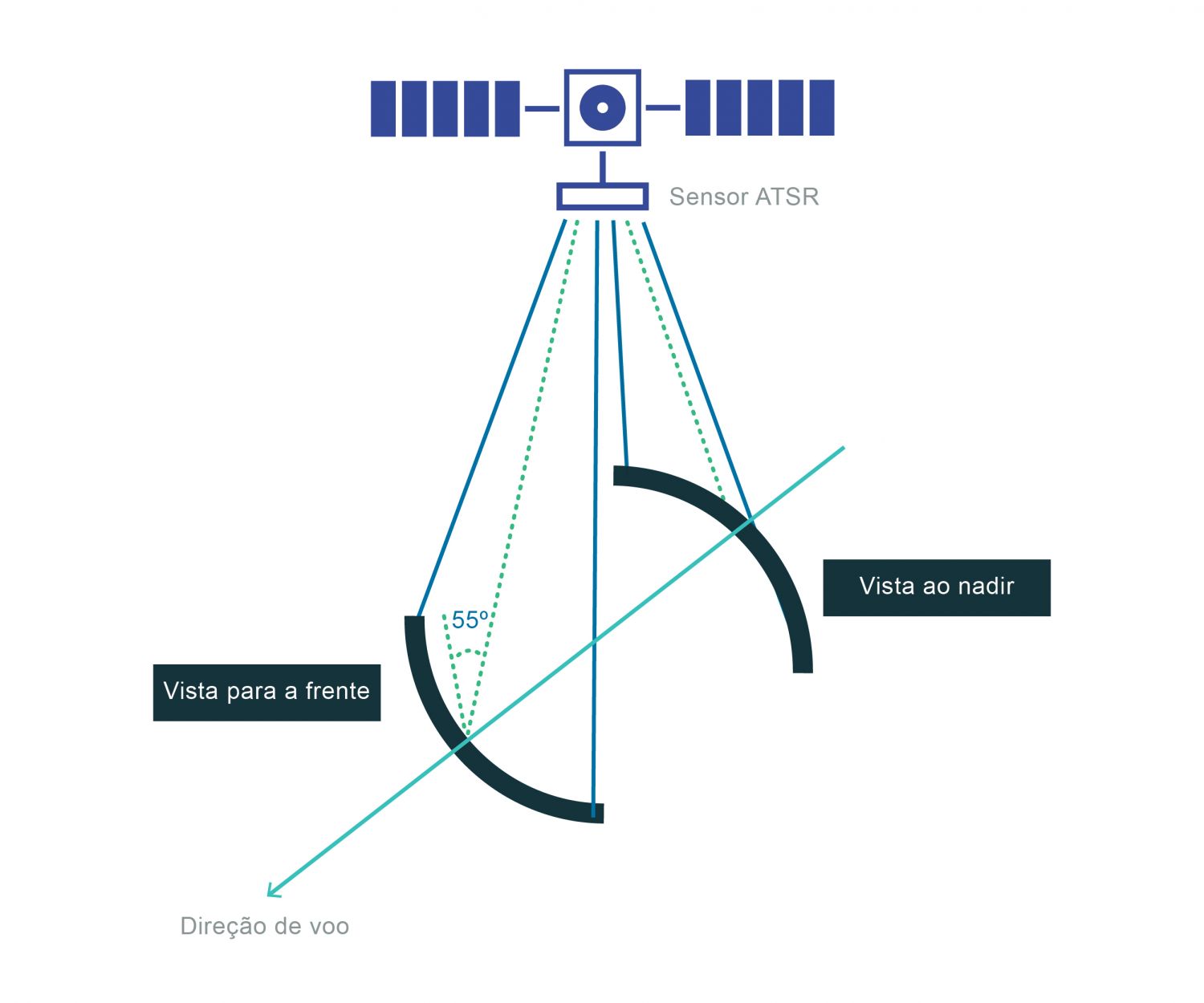
Esquema que mostra as medições através da visão em ângulo “para a frente” e da visão ao nadir (adaptado de Robinson, 2004). A correção atmosférica é feita utilizando modelos que permitem estimar o modo como a radiação foi transmitida através da atmosfera. Contudo, estes modelos por si só não são suficientes. O modo como o sensor faz as medições irá melhorar essa estimativa. Existem vários métodos de correção, como é o caso do método “multi-look”, que consiste na observação do mesmo ponto à superfície com dois ângulos diferentes. Um sensor em órbita polar com duas “visões” permite fazer uma observação “para a frente” com um ângulo entre 50° e 60°, e de seguida, apontar diretamente para baixo (visão ao nadir). Estas observações vão permitir fazer uma medição através da visão em ângulo, e pouco tempo depois, uma segunda medição do mesmo local na visão ao nadir. A temperatura de brilho medida ao nadir irá ser maior que a medida em ângulo já que esta última é feita através de uma maior camada de atmosfera. Assumindo que não tenham ocorrido alterações do local medido no tempo entre medições e que a atmosfera é uniforme no espaço das medições, as diferenças de temperatura de brilho são uma medida da atenuação atmosférica. Este método melhora a correção multiespectral já que existem diferenças de absorção atmosférica com diferentes comprimentos de onda. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
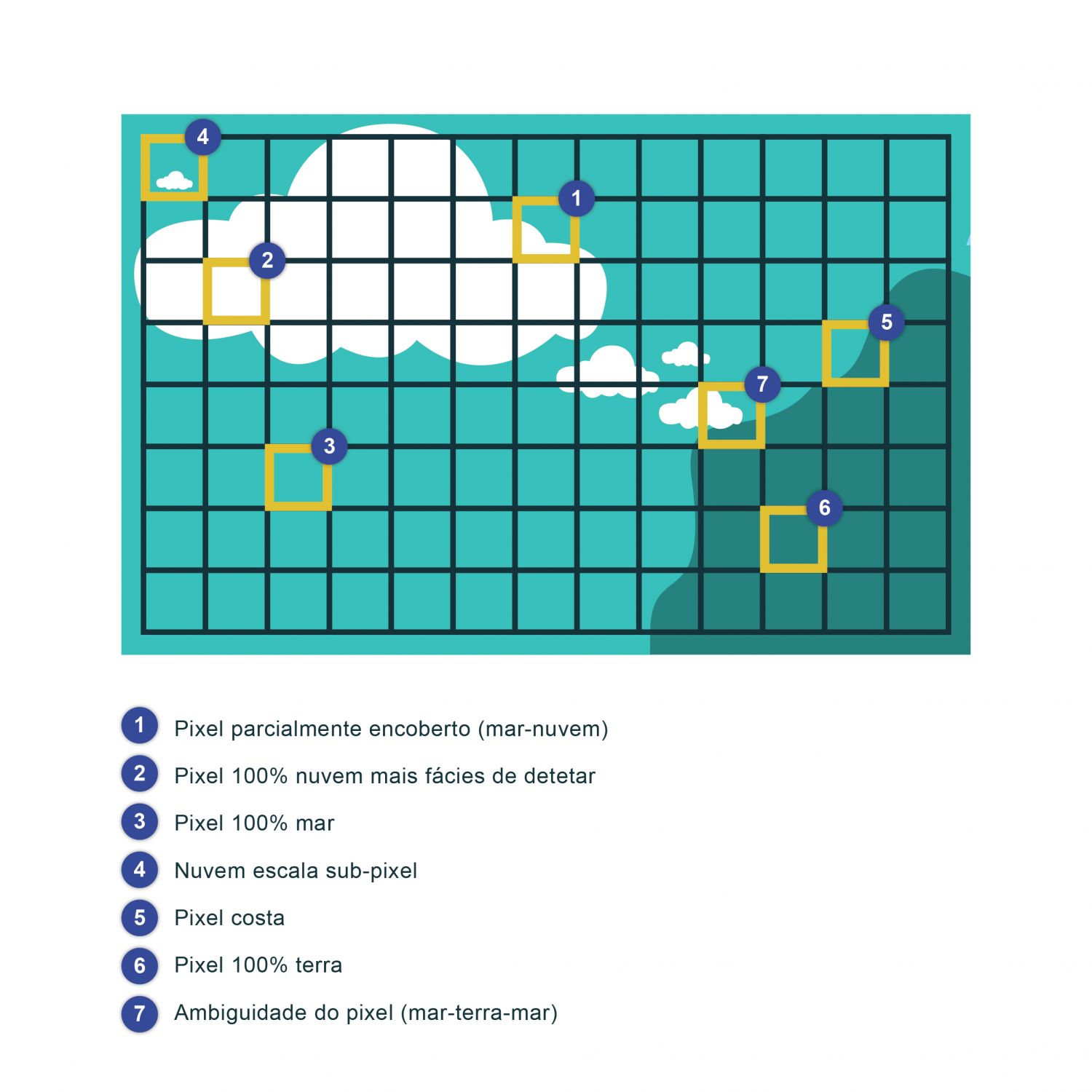
Representação esquemática dos vários tipos de contaminação por nuvens que podem existir numa imagem de satélite. Existem vários métodos de deteção da presença de nuvens: A) Limites de temperatura de brilho: já que as nuvens estão sempre a uma temperatura inferior à do oceano, estabelece-se um limite para o valor da temperatura de brilho abaixo do qual se presume contaminação por nuvem. Este teste necessita de uma análise mais profunda. B) Utilização dos canais nas bandas do visível e do infravermelho próximo: todos os sensores de infravermelhos possuem também canais no visível e no infravermelho próximo, dirigidos para o mesmo local na Terra e que são usados para a deteção de nuvens e para a deteção da fronteira terra-água. Durante o dia, estes dois canais mostram um grande contraste entre as nuvens e o mar. No entanto, no caso de nuvens mais pequenas que a escala do píxel é necessário algum cuidado, já que basta 10% do píxel estar contaminado por nuvem para alterar a temperatura de brilho. Nestes casos, eliminam-se os pixéis próximos de nuvens grandes. C) Testes de coerência espacial: quando existem muitas nuvens, a temperatura de brilho irá variar muito de píxel para píxel. Assim, quanto maior for a coerência espacial, menor será a probabilidade de haver nuvens. D) Testes multiespectrais: a presença de nuvens afeta a temperatura de brilho de tal forma que varia de canal para canal. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
Varrimento cónico dos sensores Along Track Scanning Radiometer - ATSR (visão “para a frente” e visão ao nadir). Este método de varrimento permite observar o mesmo ponto sobre a Terra duas vezes com ângulos diferentes, conseguido através de um varrimento cónico. Assim, o sensor descreve linhas curvas sobre a superfície, apontando na direção de voo com um ângulo de visão de 55° e voltando até ao nadir. Este método de varrimento tem desvantagens: o facto de descrever linhas curvas sobre a superfície torna o processo de geolocalização muito mais complicado. No entanto, esta questão fica resolvida antes das imagens chegarem aos utilizadores. Outra desvantagem é que a largura de varrimento é muito menor que a do Advanced Very High Resolution Radiometer - AVHRR, tendo por isso uma menor repetição temporal, pelo que uma cobertura total da superfície da Terra só é conseguida ao fim de quatro dias. As vantagens de um varrimento cónico consistem na melhoria conseguida para a correção atmosférica já que, para além do método multicanal, também tem a capacidade de observar o mesmo ponto através de dois ângulos diferentes. Esta visão adicional é especialmente útil no caso da presença de aerossóis atmosféricos que tornam a correção atmosférica mais difícil. O modo como faz a calibração interna também é diferente. Em cada ciclo de varrimento aponta para dois corpos negros de grande precisão e estabilidade, mantidos a temperaturas perto dos extremos observados à superfície da Terra. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
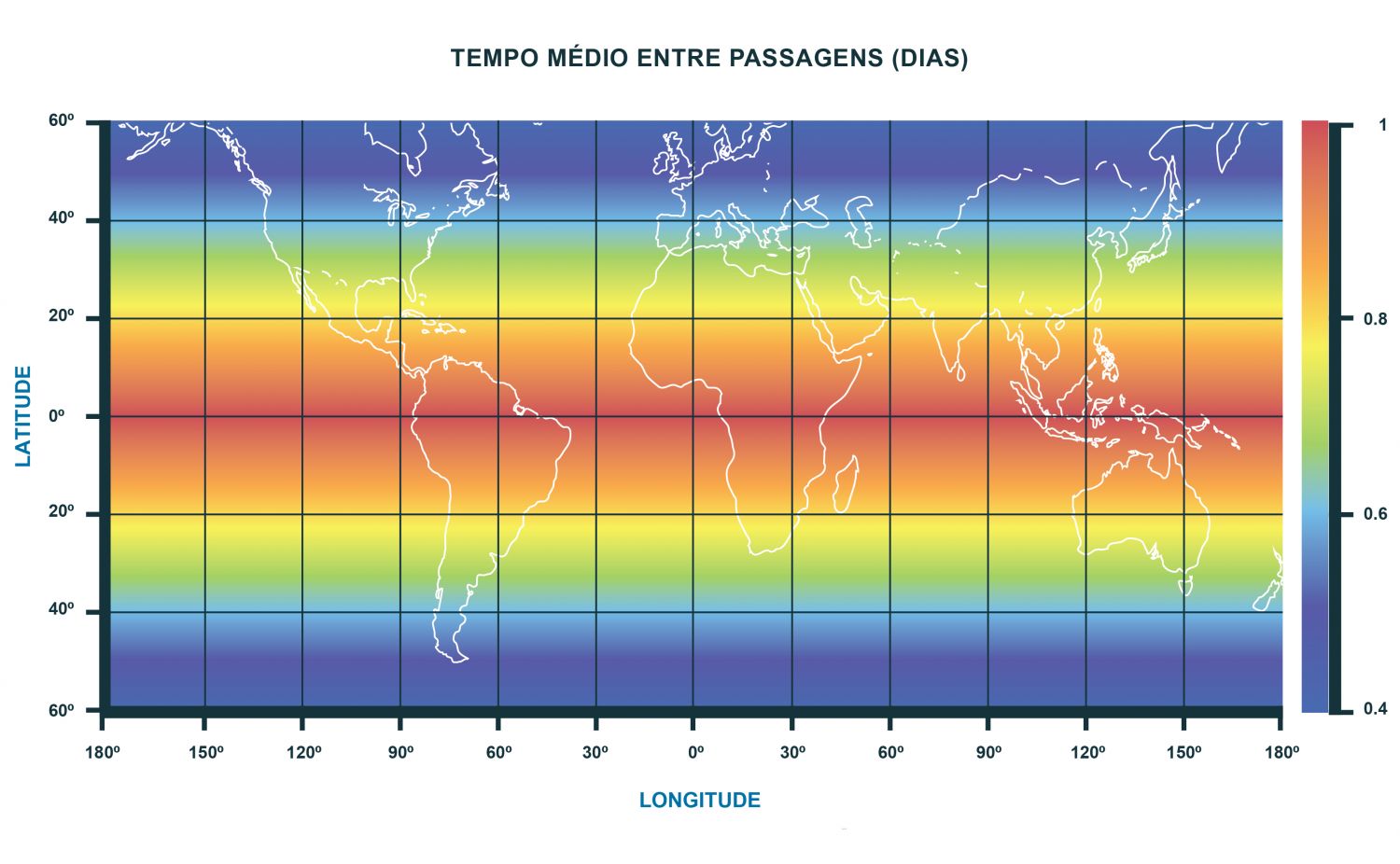
Tempo entre visitas sucessivas, em dias, com o uso da configuração de dois satélites. O sensor Sea and Land Surface Temperature Radiometer (SLSTR) será o quarto na série dos sensores Along Track Scanning Radiometer - ATSR, estando o seu lançamento previsto em dois satélites, o Sentinel-3A e o Sentinel-3B, operados pela ESA. Ambos irão ser postos em órbitas heliossíncronas com períodos de 100 minutos, mas com sentidos opostos de modo a obterem-se imagens dos mesmos locais do Globo, de manhã e à tarde. O ciclo de repetição das órbitas é de 27 dias e o sistema de dois satélites irá permitir uma melhor resolução temporal, como se pode ver na figura. O lançamento do Sentinel-3A já teve lugar em fevereiro de 2016, estando actualmente em fase de calibração. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
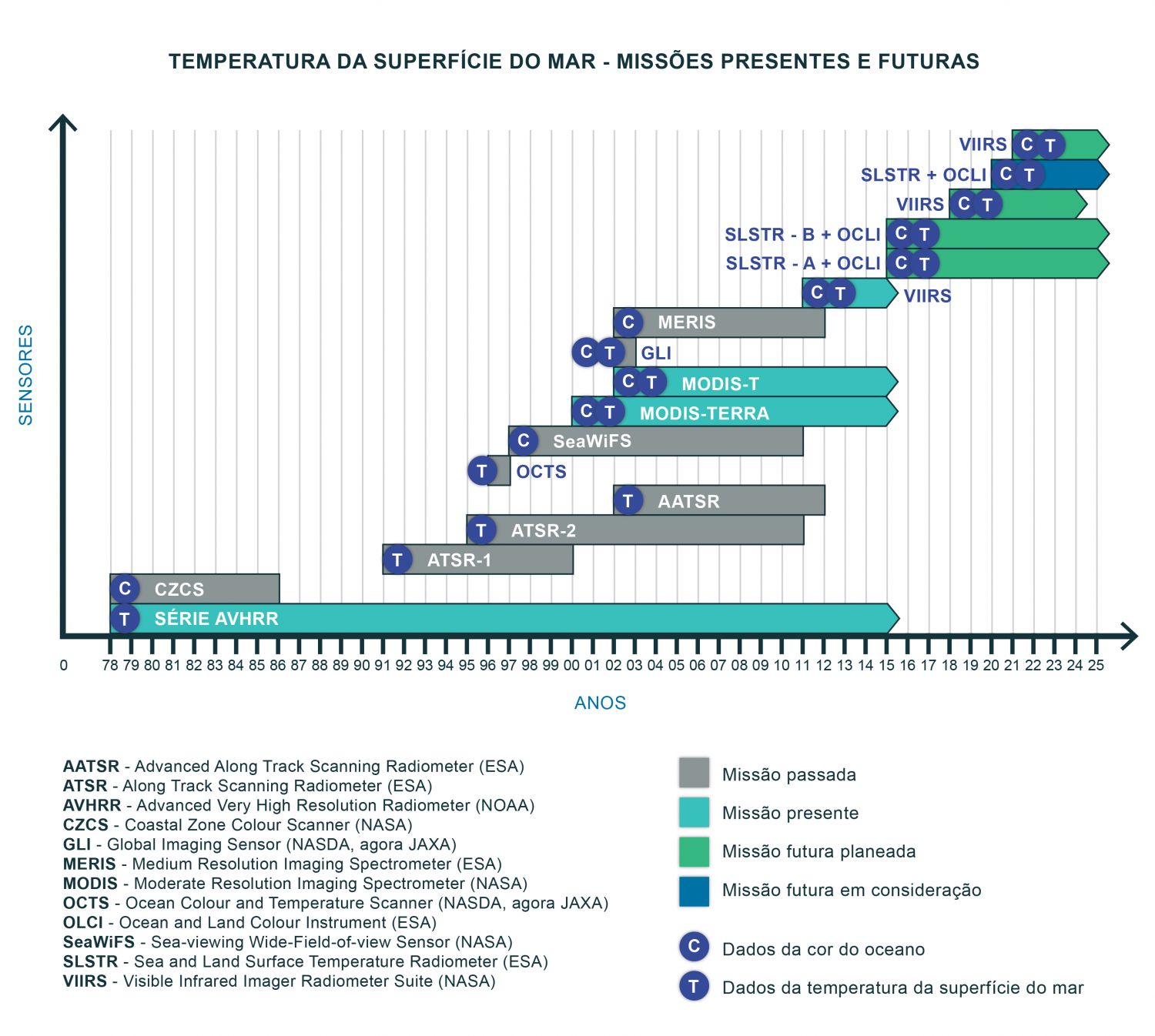
Listagem de todas as missões atuais e futuras (já planeadas e aprovadas) bem como a identificação de todos os sensores já instalados e/ou a ser instalados a bordo dos satélites, e que recolhem dados de Temperatura da Superfície do Mar - TSM. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
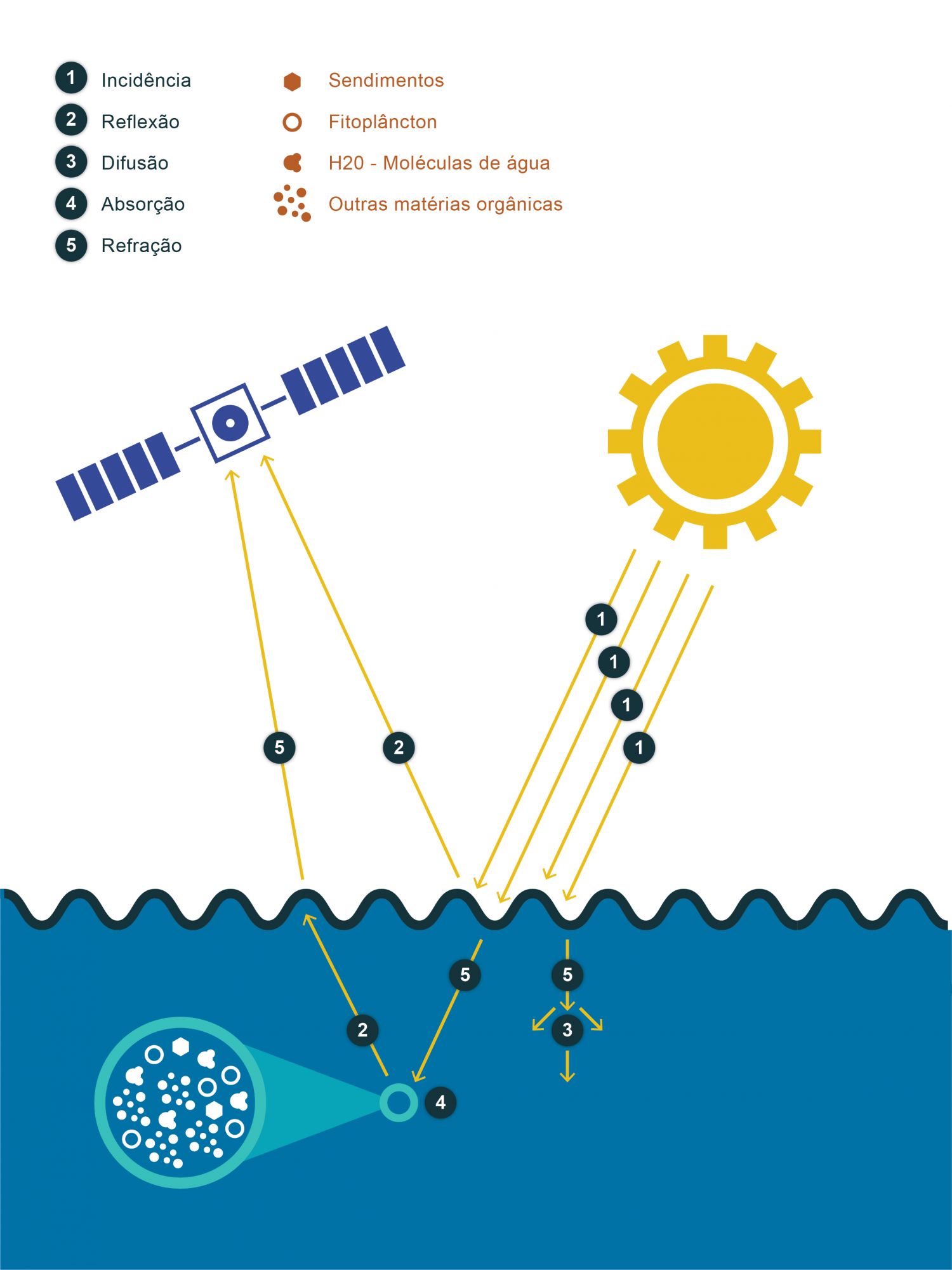
Possíveis formas de interação de luz visível no oceano. O conceito de cor do oceano é facilmente percetível já que o olho humano também recolhe informação nos comprimentos de onda do visível. É a forma como a luz interage com a água e os seus constituintes que determina o comprimento de onda da radiação retrodifundida pela coluna de água, ou seja, que determina a sua cor. Assim, a variação da cor do oceano depende da quantidade e ângulo da luz incidente, por um lado, e dos constituintes da coluna de água, por outro. Estes podem ser partículas orgânicas e inorgânicas em suspensão e matéria orgânica dissolvida. No caso da água pura, i.e., sem partículas em suspensão, a baixa absorção dos comprimentos de onda na gama dos azuis é o principal mecanismo que lhe dá cor. No entanto a profundidade da coluna de água poderá também influenciar o sinal recebido pelos satélites se for inferior à profundidade da zona eufótica. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
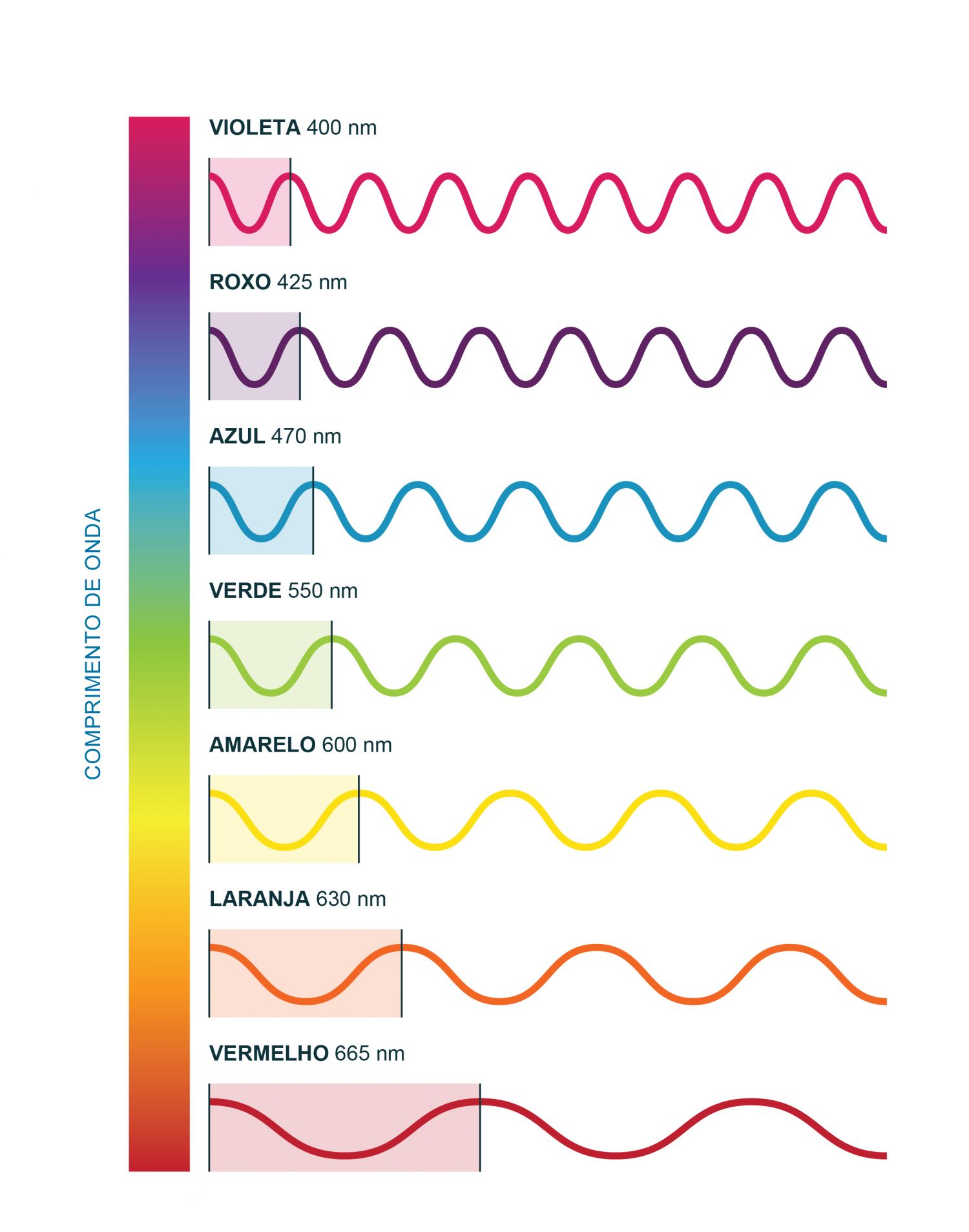
O espectro no visível: o comprimento de onda de cada cor em nm. Existem duas formas de interação da radiação eletromagnética com os constituintes do oceano: por absorção ou por difusão. O comprimento de onda da radiação absorvida ou difundida é que irá determinar a cor do mar. O espectro da luz no visível tem comprimentos de onda que vão desde os mais curtos e mais energéticos, nos violetas e azuis, até aos vermelhos, mais longos e menos energéticos. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
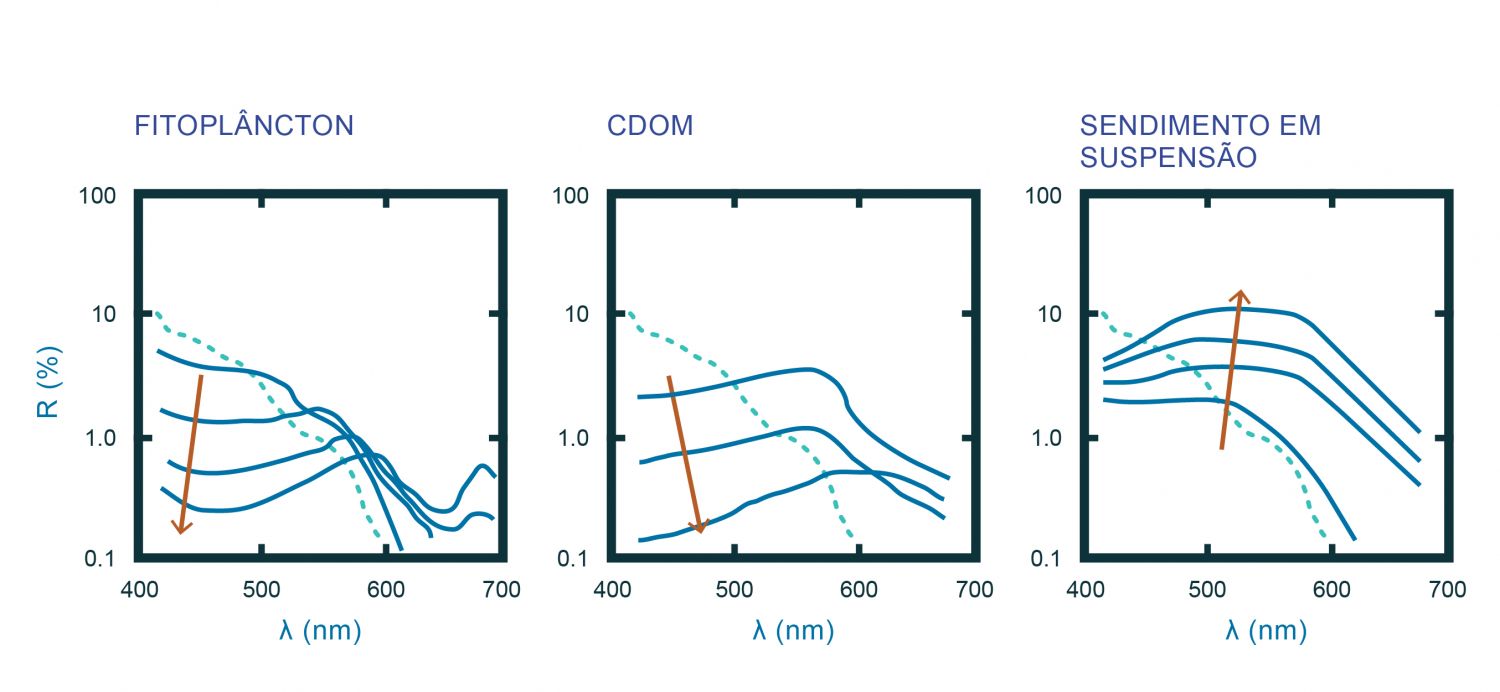
Espectro (linha sólida) idealizado de refletância de: A) fitoplâncton; B) matéria orgânica dissolvida, também designada de substância amarela (CDOM, do inglês coloured dissolved organic matter); e C) sedimento em suspensão (SPM, do inglês suspended particulate matter). A linha a tracejado representa o espectro da água pura. A seta indica o aumento de concentração do constituinte em questão (adaptado de Robinson, 2004). A determinação dos constituintes oceânicos por deteção remota é feita com base na alteração da assinatura espectral da água do mar pura. Assim, o espectro da água do mar pura serve como base para se determinar a presença destas partículas já que a radiação emitida irá ser alterada com a presença dos vários constituintes. Os constituintes opticamente ativos podem ser agrupados, de acordo com a forma espectral, nos três grupos ilustrados em A, B e C. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
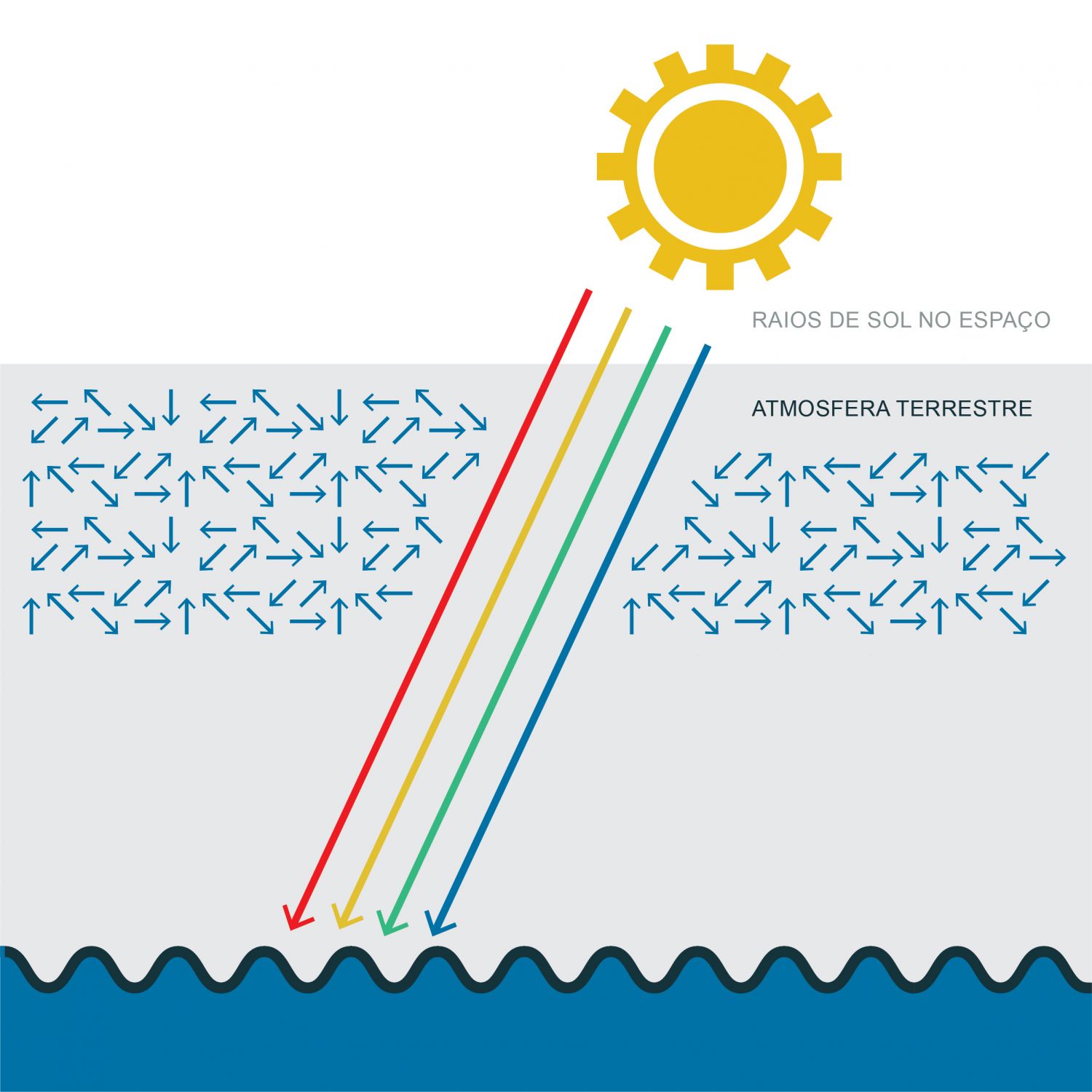
Difusão na atmosfera: a luz solar ao atravessar a atmosfera também irá interagir com os constituintes atmosféricos; os comprimentos de onda azuis são os principais a serem difundidos na atmosfera pelas moléculas de gases atmosféricos. É por esta razão que o olho humano vê o céu da cor azul. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
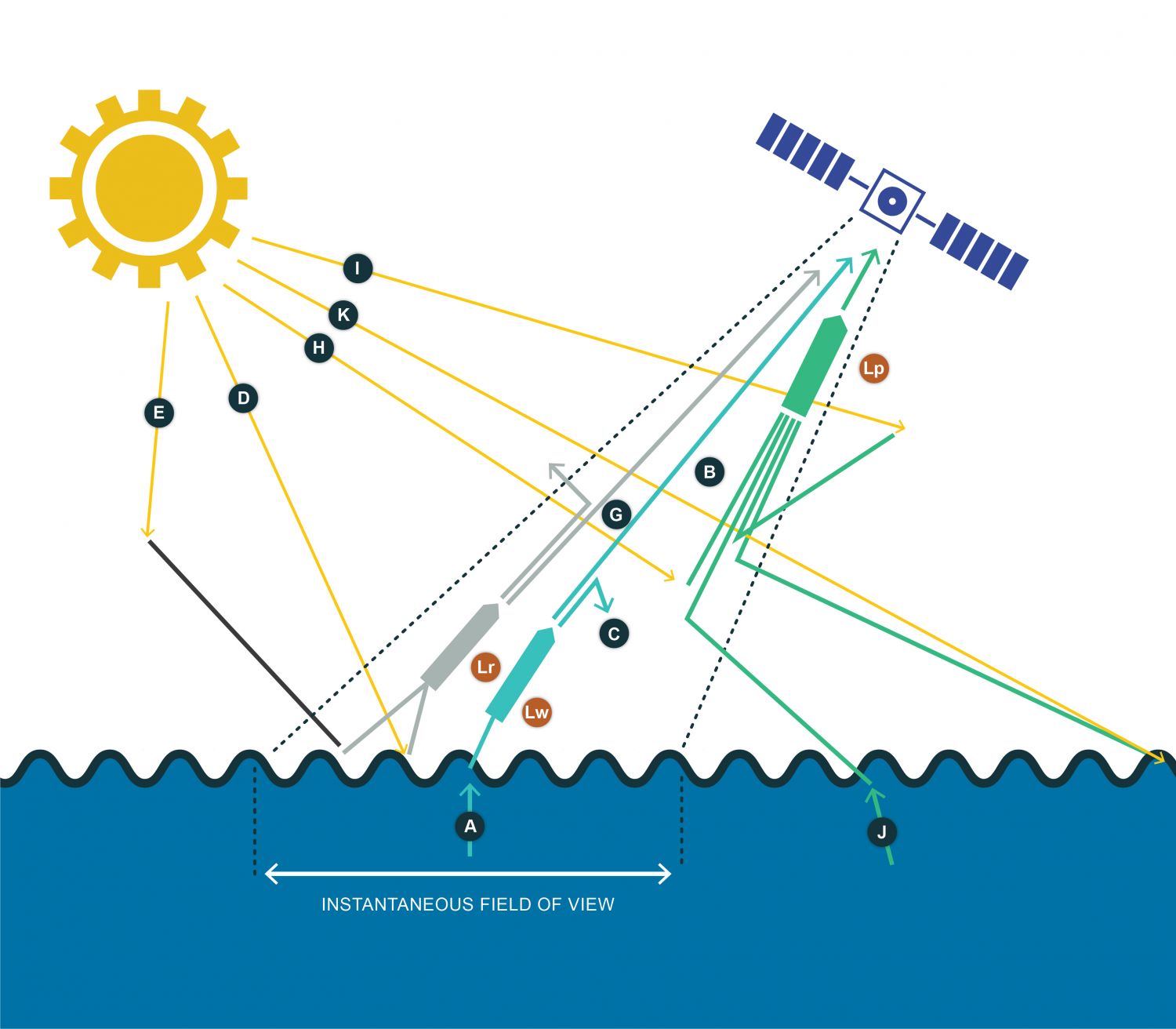
Esquema dos possíveis percursos óticos da radiação eletromagnética na região do visível, entre a superfície do oceano e o sensor: A) Raios ascendentes que chegam do interior da coluna de água para a sua superfície, e que são resultantes da absorção/difusão da água do mar e dos seus constituintes. Ao chegar à superfície o raio é refratado em direção ao sensor e contribui para Lw, definida como a radiância com origem na coluna de água na área situada no campo de visão instantânea do sensor (IFOV) e na direção do sensor. B) Corresponde à porção da radiância, Lw, que chega ao sensor. Esta porção contém informação dos constituintes do oceano. Os restantes raios que chegam ao sensor são provenientes ou da atmosfera ou de áreas fora do IFOV e não contêm informação do oceano contido no IFOV. C) Porção dos raios A que são absorvidos pela atmosfera ou difundidos pelos seus constituintes para fora do campo de visão do sensor. Note-se que (A)=(B)+(C). D) Raios emitidos pelo sol que são refletidos à superfície do oceano para o sensor. Não contêm informação do mar já que não penetraram a sua superfície. Contribui para a radiância refletida, Lr, definida como a radiância refletida pela superfície do mar que se encontra dentro do campo de visão instantânea do sensor, na direção do sensor. Lr é também conhecida como Sun Glitter, Sun Glint ou reflexão especular solar. E) Raios difundidos pela atmosfera que depois são refletidos à superfície do oceano para dentro do campo de visão do sensor. Também contribuem para Lr e são conhecidos como Sky Glitter, Sky Glint ou reflexão especular atmosférica. F) Raios de Lr que não chegam ao sensor, podendo ser absorvidos ou difundidos para fora do seu campo de visão. G) Raios de Lr que chegam ao sensor. Não contêm informação do mar. H) Raios emitidos pelo sol que são difundidos para dentro do campo de visão do sensor pelos constituintes atmosféricos, sem nunca terem chegado à superfície do oceano. I) Raios emitidos pelo sol que entram no campo de visão do sensor após sucessivas difusões por parte dos constituintes atmosféricos. J) Raios com origem na superfície do oceano, mas de uma área fora do campo de visão instantânea, e que por isso, não fazem parte da radiância Lw. K) difundidos pela atmosfera na direcção do sensor, provenientes da reflexão na superfície do oceano fora do campo de visão do sensor e por isso não contribuem para Lr. Note-se que a radiância que chega ao sensor devido a difusão na atmosfera, Lp, é resultado de (H)+(I)+(J)+(K). Assim a radiância total que chega ao sensor, Ls, é composta pela porção de Lw que chega ao sensor, e por Lp e Lr. É necessário por isso estimar com rigor Lp e Lr para poder conhecer- se a porção de Lw que chega ao sensor. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
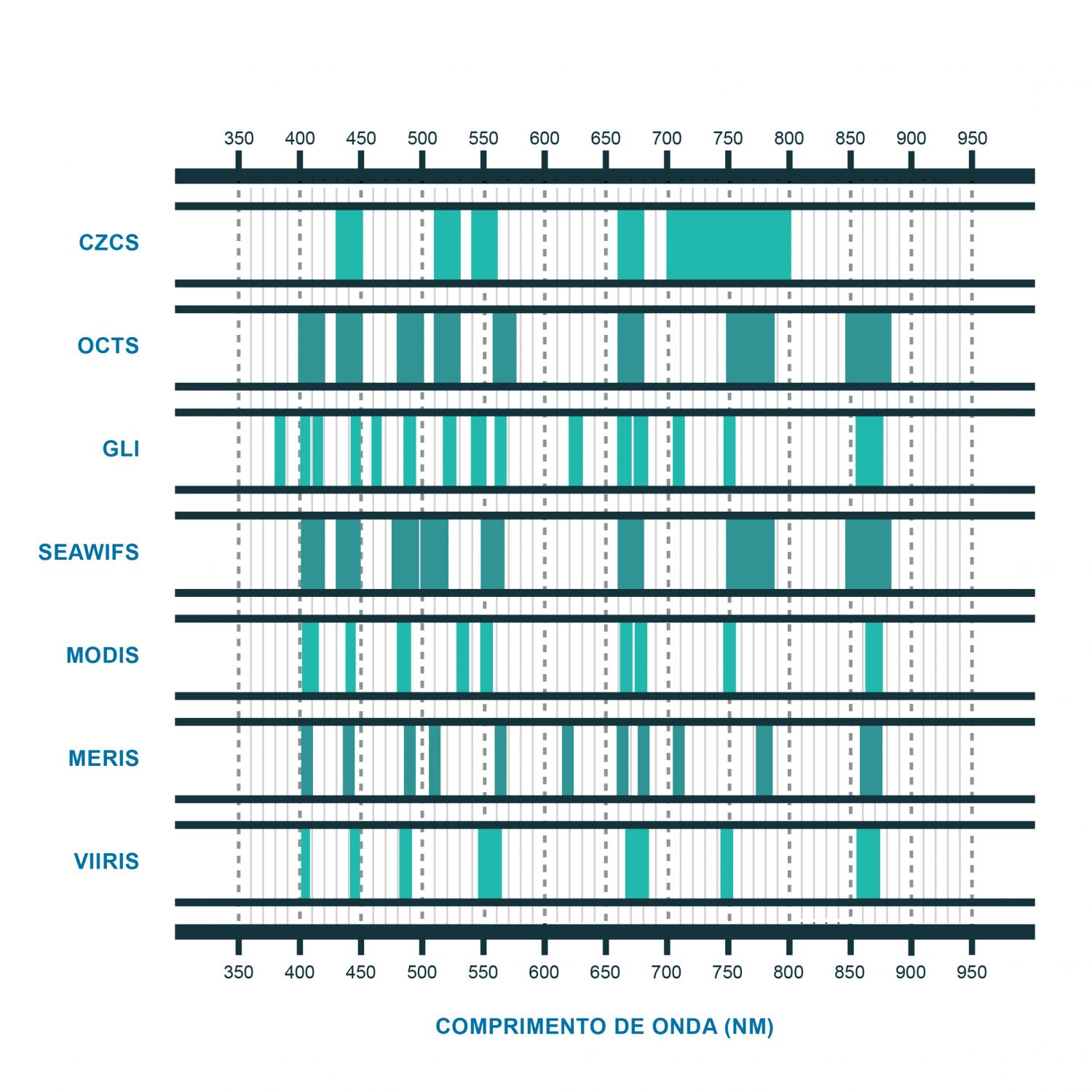
Os canais dos principais sensores de cor do oceano (adaptado de IOCCG, 1998). A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
Relações tróficas entre alguns organismos. O fitoplâncton é composto por organismos microscópicos que têm uma importância muito elevada a nível global, à escala do planeta Terra, uma vez que, por serem produtores primários, estão na base das cadeias alimentares oceânicas. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
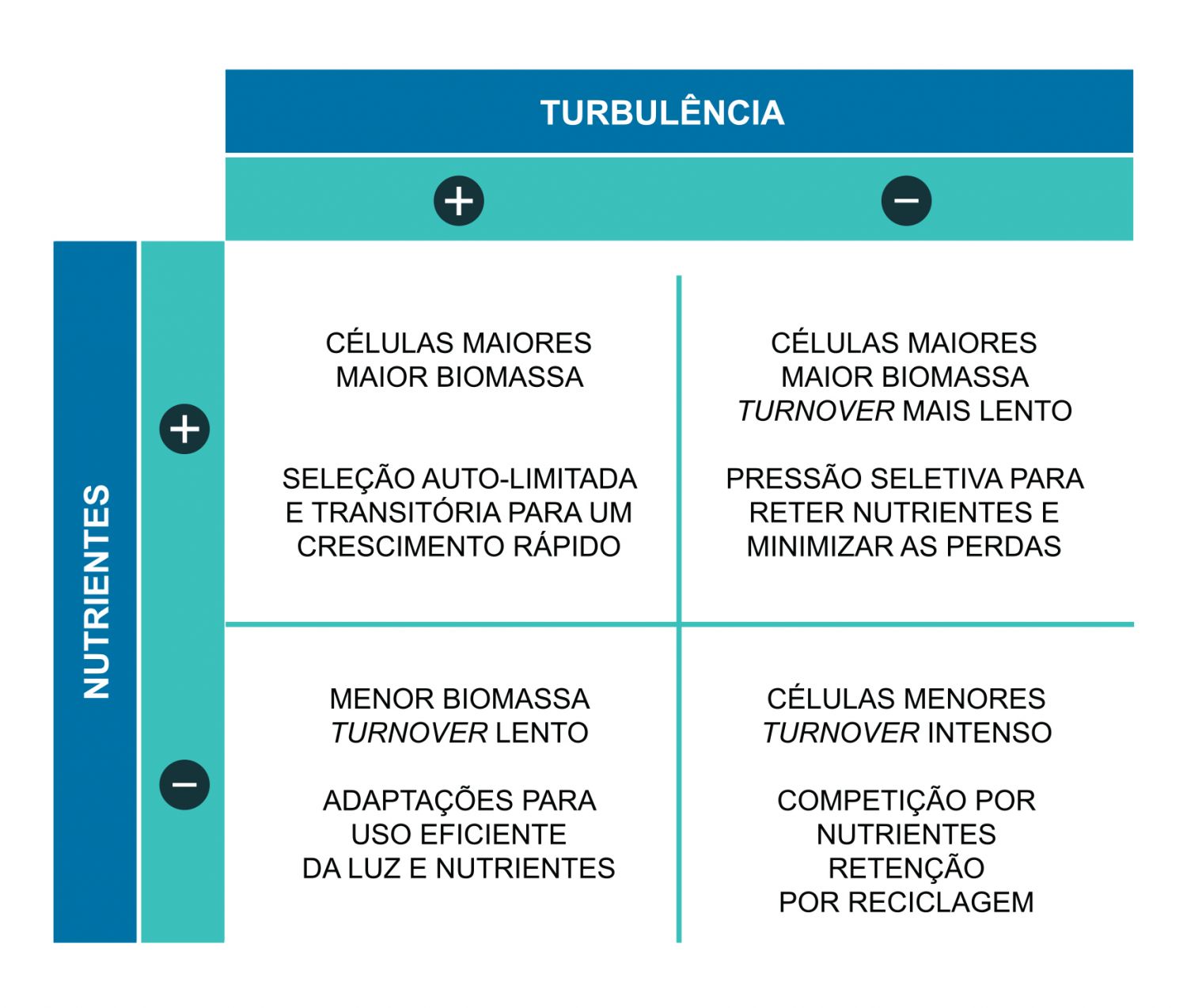
Relações entre as comunidades de fitoplâncton, os nutrientes e a turbulência, como proposto por Margalef (1978) e adaptado por Cullen et al. (2002). As células fitoplantónicas estão fortemente sujeitas às condições ambientais existentes em seu redor. Estas englobam principalmente as condições físico-químicas (e.g. salinidade e temperatura), níveis de luminosidade, condições oceanográficas (e.g. estabilidade da coluna de água) e disponibilidade de nutrientes. As variações dos componentes ambientais acabam por definir a dinâmica do fitoplâncton, já que este responde de uma forma rápida às alterações. O conhecimento sobre a resposta do fitoplâncton ao afloramento, assim como sobre a sucessão natural dos grupos à medida que as condições ambientais se vão alterando é essencial. Ramon Margalef foi o primeiro a introduzir estes conceitos e a tentar explicar a sucessão sazonal como um processo regulado por forças físicas existentes nas regiões temperadas, como é o caso de Portugal. As representações esquemáticas (Mandala) de Margalef têm vindo a ser desenvolvidas para incluir outros aspetos, como a importância do picofitoplâncton em zonas oligotróficas, com baixa turbulência e reduzida concentração de nutrientes. Esta perspetiva indica que durante eventos de afloramento, com elevada turbulência e enriquecimento das águas em nutrientes, o grupo que prolifera é o das diatomáceas. Geralmente, as diatomáceas também contribuem para um aumento significativo da biomassa total fitoplantónica, dado terem um biovolume relativamente elevado. À medida que o afloramento vai enfraquecendo, há tendência para a estabilização ou estratificação da coluna de água, passando a haver condições mais favoráveis à proliferação de dinoflagelados. A utilização deste ficheiro é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)
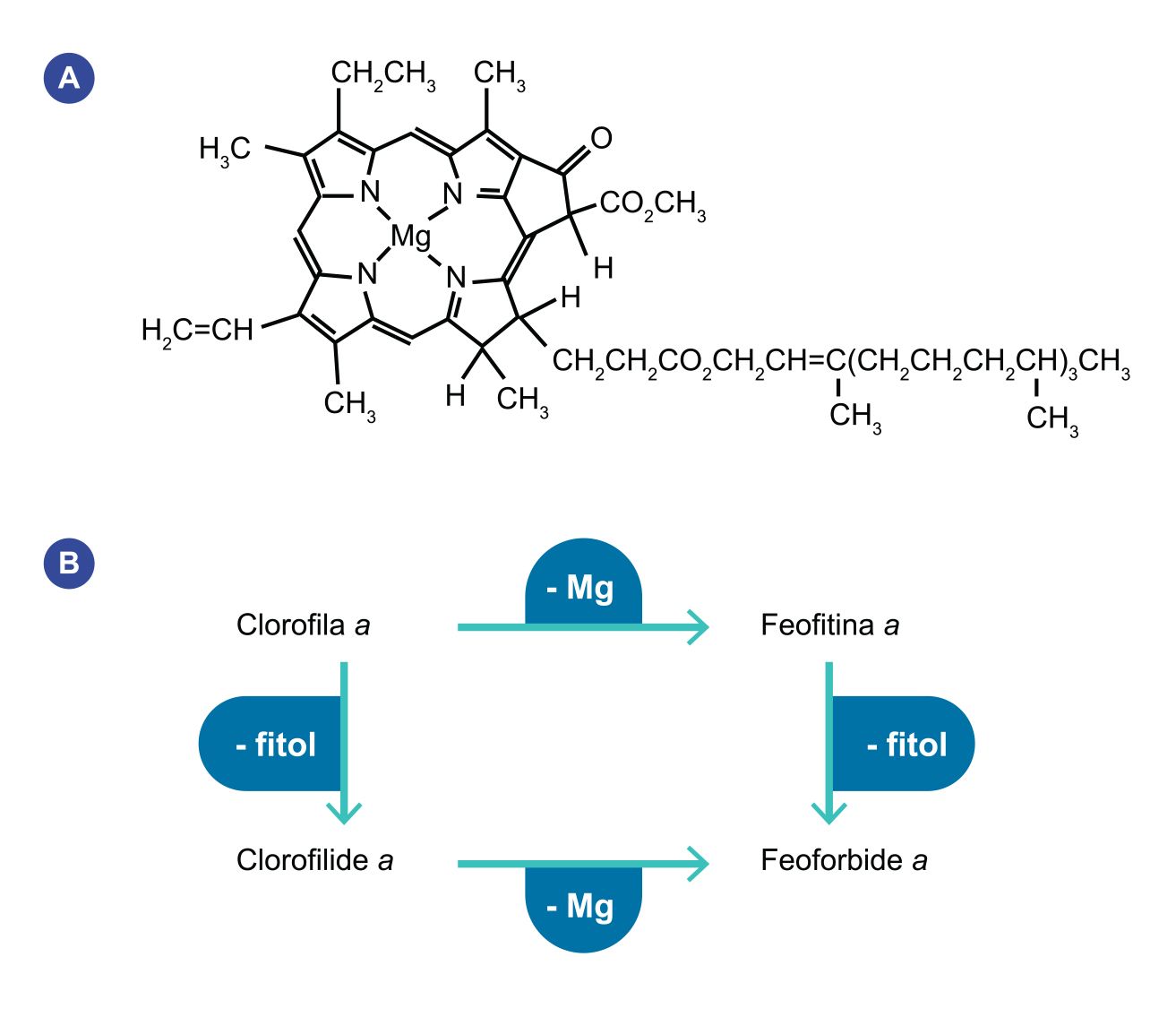
A) Estrutura química da clorofila com representação do anel de magnésio e da cadeia fitol (Fonte: Wisconsin Initiative for Science Literacy, http://scifun.chem.wisc.edu/chemweek/chlrphyl/chlrphyl.html). B) Conversão da molécula de clorofila a nos seus derivados. A quantificação da clorofila a pode ser efectuada por fluorometria, espectrofotometria ou por cromatografia. Para a quantificação da clorofila a, o método considerado mais preciso é o da cromatografia líquida de alta precisão (HPLC, do inglês High Performance Liquid Chromatography). Este método separa os vários pigmentos de acordo com a sua polaridade, sendo a clorofila a um dos pigmentos menos polares. A sua estrutura química pode, contudo, ser alterada por diferentes processos biológicos e físico-químicos e transformar- se em derivados mais polares. Estes derivados são fotossinteticamente inativos mas absorvem luz em comprimentos de onda semelhantes à molécula de clorofila a. As transformações mais frequentes que ocorrem na molécula de clorofila a são a perda do átomo central de magnésio, a perda da cadeia de fitol, ou a perda de ambos, transformando-se em feofitina a, clorofilide a, e feoforbide a, respetivamente. A utilização da figura B) é regulada nos termos da licença Creative Commons Attribution 4.0 (CC BY-NC-ND 4.0, https://creativecommons.org/licenses/by-nc-nd/4.0/)